
Page 49 - 电力与能源2021年第二期
P. 49
赵 旭, 等: 虚拟环境下电力安全作业动作模拟 1 7
9
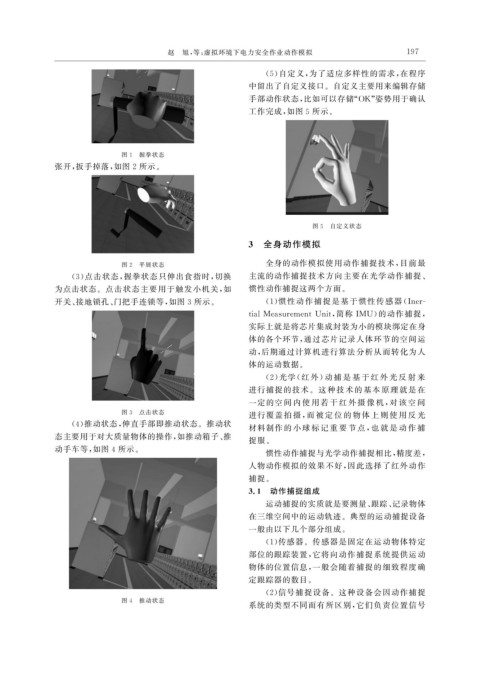
( 5 ) 自定义, 为了适应多样性的需求, 在程序
中留出了自定义接口。自定义主要用来编辑存储
手部动作状态, 比如可以存储“ OK ” 姿势用于确认
工作完成, 如图 5 所示。
图 1 握拳状态
张开, 扳手掉落, 如图 2 所示。
图 5 自定义状态
3 全身动作模拟
图 2 平展状态 全身的动作模拟使用动作捕捉技术, 目前最
( 3 ) 点击状态, 握拳状态只伸出食指时, 切换 主流的动作捕捉技术方向主要在光学动作捕捉、
为点击状态。点击状态主要用于触发小机关, 如 惯性动作捕捉这两个方面。
开关、 接地锁孔、 门把手连锁等, 如图 3 所示。 ( 1 ) 惯性动作捕捉是基于惯性传感器 ( Iner-
tialMeasurementUnit , 简称 IMU ) 的动作捕捉,
实际上就是将芯片集成封装为小的模块绑定在身
体的各个环节, 通过芯片记录人体环节的空间运
动, 后期通过计算机进行算法分析从而转化为人
体的运动数据。
( 2 ) 光学( 红 外) 动 捕 是 基 于 红 外 光 反 射 来
进行捕捉的技术。这种技 术的基本原理就是在
一定的空 间 内 使 用 若 干 红 外 摄 像 机, 对 该 空 间
图 3 点击状态 进行覆盖 拍 摄, 而 被 定 位 的 物 体 上 则 使 用 反 光
( 4 ) 推动状态, 伸直手部即推动状态。推动状
材料制作 的 小 球 标 记 重 要 节 点, 也 就 是 动 作 捕
态主要用于对大质量物体的操作, 如推动箱子、 推
捉服。
动手车等, 如图 4 所示。
惯性动作捕捉与光学动作捕捉相比, 精度差,
人物动作模拟的效果不好, 因此选择了红外动作
捕捉。
3.1 动作捕捉组成
运动捕捉的实质就是要测量、 跟踪、 记录物体
在三维空间中的运动轨迹。典型的运动捕捉设备
一般由以下几个部分组成。
( 1 ) 传感器。传感器是固定在运动物体特定
部位的跟踪装置, 它将向动作捕捉系统提供运动
物体的位置信息, 一般会随着捕捉的细致程度确
定跟踪器的数目。
( 2 ) 信号捕捉设备。这种设备会因动作捕捉
图 4 推动状态
系统的类型不同而有所区别, 它们负责位置信号