
Page 50 - 电力与能源2021年第二期
P. 50
1 9 8 赵 旭, 等: 虚拟环境下电力安全作业动作模拟
的捕捉。对于机械系统来说是一块捕捉电信号的
线路板, 对于光学动作捕捉系统则是高分辨率红
外摄像机。
( 3 ) 数据传输设备。动作捕捉系统, 特别是需
要实时效果的动作捕捉系统需要将大量的运动数
据从信号捕捉设备快速准确地传输到计算机系统
进行处理, 而数据传输设备就是用来完成此项工
作的。
( 4 ) 数据处理设备。经过动作捕捉系统捕捉
到的数据需要修正、 处理后还要与三维模型相结
合才能完成计算机动画制作, 这就需要应用数据
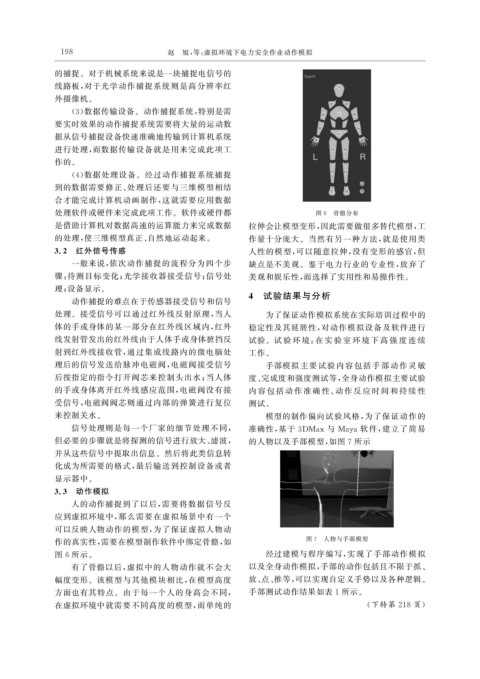
处理软件或硬件来完成此项工作。软件或硬件都 图 6 骨骼分布
是借助计算机对数据高速的运算能力来完成数据 拉伸会让模型变形, 因此需要做很多替代模型, 工
的处理, 使三维模型真正、 自然地运动起来。 作量十分庞大。当然有另一种方法, 就是使用类
3.2 红外信号传感 人性的模型, 可以随意拉伸, 没有变形的感官, 但
一般来说, 依次动作捕捉的流程分为四个步 缺点是不美观。鉴于电力行业的专业性, 放弃了
骤: 待测目标变化; 光学接收器接受信号; 信号处 美观和娱乐性, 而选择了实用性和易操作性。
理; 设备显示。
4 试验结果与分析
动作捕捉的难点在于传感器接受信号和信号
处理。接受信号可以通过红外线反射原理, 当人 为了保证动作模拟系统在实际培训过程中的
体的手或身体的某一部分在红外线区域内, 红外 稳定性及其延展性, 对动作模拟设备及软件进行
线发射管发出的红外线由于人体手或身体摭挡反 试验。试 验 环 境: 在 实 验 室 环 境 下 高 强 度 连 续
射到红外线接收管, 通过集成线路内的微电脑处 工作。
理后的信号发送给脉冲电磁阀, 电磁阀接受信号 手部模拟主要试验内容包括 手 部 动 作 灵 敏
后按指定的指令打开阀芯来控制头出水; 当人体 度、 完成度和强度测试等, 全身动作模拟主要试验
的手或身体离开红外线感应范围, 电磁阀没有接 内容 包 括 动 作 准 确 性、 动 作 反 应 时 间 和 持 续 性
受信号, 电磁阀阀芯则通过内部的弹簧进行复位 测试。
来控制关水。 模型的制作偏向试验风格, 为了保证动作的
信号处理则是每一个厂家的细节处理不同, 准确性, 基于 3DMax 与 Ma y a 软件, 建立了简易
但必要的步骤就是将探测的信号进行放大、 滤波, 的人物以及手部模型, 如图 7 所示
并从这些信号中提取出信息。然后将此类信息转
化成为所需要的格式, 最后输送到控制设备或者
显示器中。
3.3 动作模拟
人的动作捕捉到了以后, 需要将数据信号反
应到虚拟环境中, 那么需要在虚拟场景中有一个
可以反映人物动作的模型, 为了保证虚拟人物动
作的真实性, 需要在模型制作软件中绑定骨骼, 如 图 7 人物与手部模型
图 6 所示。 经过建模与程序编写, 实现了手部动作模拟
有了骨骼以后, 虚拟中的人物动作就不会大 以及全身动作模拟, 手部的动作包括且不限于抓、
幅度变形。该模型与其他模块相比, 在模型高度 放、 点、 推等, 可以实现自定义手势以及各种逻辑。
方面也有其特点。由于每一个人的身高会不同, 手部测试动作结果如表 1 所示。
在虚拟环境中就需要不同高度的模型, 而单纯的 ( 下转第 218 页)