
Page 42 - 电力与能源2023年第四期
P. 42
348 王昱皓,等:输电导线动态微应变在线检测装置研究
快,更重要的是可以节省 CPU 资源。如此便完成
了一次数据采集,后续则由 STM32 对数据进行处
理计算。采样频率、采样间隔、采样时间等均可以
通过程序交互界面进行设定。采用这种数据采集
策略更有利于实现设备的低功耗。
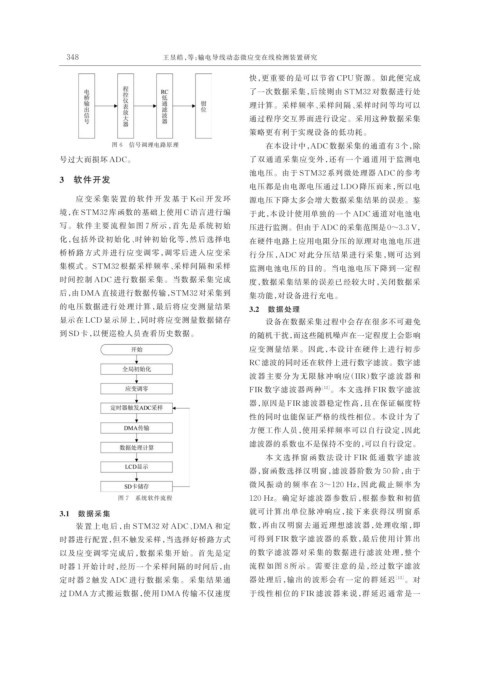
图 6 信号调理电路原理 在本设计中,ADC 数据采集的通道有 3 个,除
号过大而损坏 ADC。 了双通道采集应变外,还有一个通道用于监测电
池电压。由于 STM32 系列微处理器 ADC 的参考
3 软件开发
电压都是由电源电压通过 LDO 降压而来,所以电
应变采集装置的软件开发基于 Keil 开发环 源电压下降太多会增大数据采集结果的误差。鉴
境,在 STM32 库函数的基础上使用 C 语言进行编 于此,本设计使用单独的一个 ADC 通道对电池电
写。软件主要流程如图 7 所示,首先是系统初始 压进行监测。但由于 ADC的采集范围是 0~3.3 V,
化,包括外设初始化、时钟初始化等,然后选择电 在硬件电路上应用电阻分压的原理对电池电压进
桥桥路方式并进行应变调零,调零后进入应变采 行分压,ADC 对此分压结果进行采集,则可达到
集模式。STM32 根据采样频率、采样间隔和采样 监测电池电压的目的。当电池电压下降到一定程
时间控制 ADC 进行数据采集。当数据采集完成 度,数据采集结果的误差已经较大时,关闭数据采
后,由 DMA 直接进行数据传输,STM32 对采集到 集功能,对设备进行充电。
的电压数据进行处理计算,最后将应变测量结果 3.2 数据处理
显示在 LCD 显示屏上,同时将应变测量数据储存 设备在数据采集过程中会存在很多不可避免
到 SD 卡,以便巡检人员查看历史数据。 的随机干扰,而这些随机噪声在一定程度上会影响
应变测量结果。因此,本设计在硬件上进行初步
RC 滤波的同时还在软件上进行数字滤波。数字滤
波器主要分为无限脉冲响应(IIR)数字滤波器和
FIR 数字滤波器两种 [12] 。本文选择 FIR 数字滤波
器,原因是 FIR 滤波器稳定性高,且在保证幅度特
性的同时也能保证严格的线性相位。本设计为了
方便工作人员,使用采样频率可以自行设定,因此
滤波器的系数也不是保持不变的,可以自行设定。
本文选择窗函数法设计 FIR 低通数字滤波
器,窗函数选择汉明窗,滤波器阶数为 50 阶,由于
微风振动的频率在 3~120 Hz,因此截止频率为
图 7 系统软件流程 120 Hz。确定好滤波器参数后,根据参数和初值
3.1 数据采集 就可计算出单位脉冲响应,接下来获得汉明窗系
装置上电后,由 STM32 对 ADC、DMA 和定 数,再由汉明窗去逼近理想滤波器,处理收缩,即
时器进行配置,但不触发采样,当选择好桥路方式 可得到 FIR 数字滤波器的系数,最后使用计算出
以及应变调零完成后,数据采集开始。首先是定 的数字滤波器对采集的数据进行滤波处理,整个
时器 1 开始计时,经历一个采样间隔的时间后,由 流程如图 8 所示。需要注意的是,经过数字滤波
定时器 2 触发 ADC 进行数据采集。采集结果通 器处理后,输出的波形会有一定的群延迟 [13] 。对
过 DMA 方式搬运数据,使用 DMA 传输不仅速度 于线性相位的 FIR 滤波器来说,群延迟通常是一