
Page 82 - 电力与能源2024年第四期
P. 82
476 吴张傲:基于遗传算法的多无人机塔杆巡检任务分配算法研究
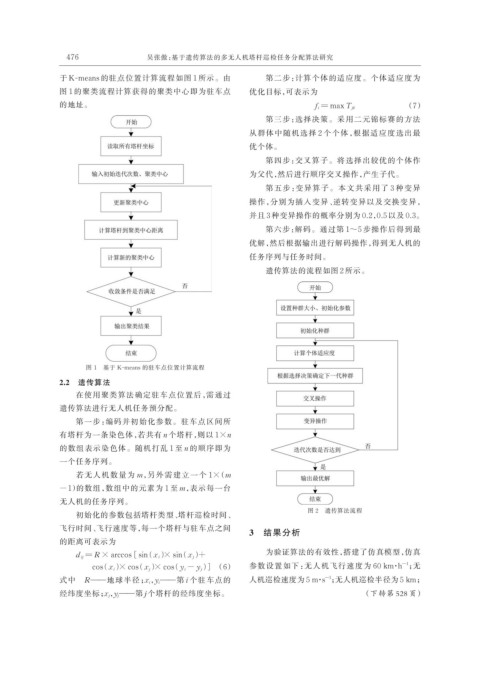
于 K-means 的驻点位置计算流程如图 1 所示。由 第二步:计算个体的适应度。个体适应度为
图 1 的聚类流程计算获得的聚类中心即为驻车点 优化目标,可表示为
的地址。 f i = max T jk (7)
第三步:选择决策。采用二元锦标赛的方法
从群体中随机选择 2 个个体,根据适应度选出最
优个体。
第四步:交叉算子。将选择出较优的个体作
为父代,然后进行顺序交叉操作,产生子代。
第五步:变异算子。本文共采用了 3 种变异
操作,分别为插入变异、逆转变异以及交换变异,
并且 3 种变异操作的概率分别为 0.2,0.5 以及 0.3。
第六步:解码。通过第 1~5 步操作后得到最
优解,然后根据输出进行解码操作,得到无人机的
任务序列与任务时间。
遗传算法的流程如图 2 所示。
图 1 基于 K-means 的驻车点位置计算流程
2.2 遗传算法
在使用聚类算法确定驻车点位置后,需通过
遗传算法进行无人机任务预分配。
第一步:编码并初始化参数。驻车点区间所
有塔杆为一条染色体,若共有 n 个塔杆,则以 1×n
的数组表示染色体。随机打乱 1 至 n 的顺序即为
一个任务序列。
若无人机数量为 m,另外需建立一个 1×(m
−1)的数组,数组中的元素为 1 至 m,表示每一台
无人机的任务序列。
图 2 遗传算法流程
初始化的参数包括塔杆类型、塔杆巡检时间、
飞行时间、飞行速度等,每一个塔杆与驻车点之间
3 结果分析
的距离可表示为
为验证算法的有效性,搭建了仿真模型,仿真
d ij = R × arccos [ sin ( x i )× sin ( x j )+
—1
cos ( x i )× cos ( x j )× cos ( y i - y j ) ] (6) 参数设置如下:无人机飞行速度为 60 km·h ;无
—1
式中 R——地球半径;x i,y i——第 i 个驻车点的 人机巡检速度为 5 m·s ;无人机巡检半径为 5 km;
经纬度坐标;x j,y j——第 j个塔杆的经纬度坐标。 (下转第 528 页)