
Page 34 - 电力与能源2021年第六期
P. 34
6 4 2 龚波涛, 等: 基于全时空增强现实定位与可视化技术的排管埋深探测技术
排管埋深误差限差表示为
m
0.15
ξ h = ∑ h i ( 19 )
m
i = 1
在满足 M h<0.5 ξ h 情况下, 埋深校正呈现合
格状态。将通过计算得到的a 与 b 的最终值在式
( 14 ) 中执行代入操作, 得到最终的排管埋深。
2 试验与分析
本文以 D 市某区埋深为 1.5~3m 的排管为
试验对象, 应用本文方法对排管的实际埋深进行
探测, 验 证 该 方 法 在 进 行 排 管 埋 深 探 测 方 面 的
性能。
为验证本文方法的可行性, 对 D 市某区排管
上的 15 个探测点进行埋深探测, 得到的排管埋深
探测表如表 1 所示。
表 1 排管埋深探测表 m
探测点号 视埋深 改进埋深 实际埋深
1 2.06 1.21 1.57
2 2.41 1.53 1.57
3 2.59 1.71 1.57
4 2.77 1.87 1.87
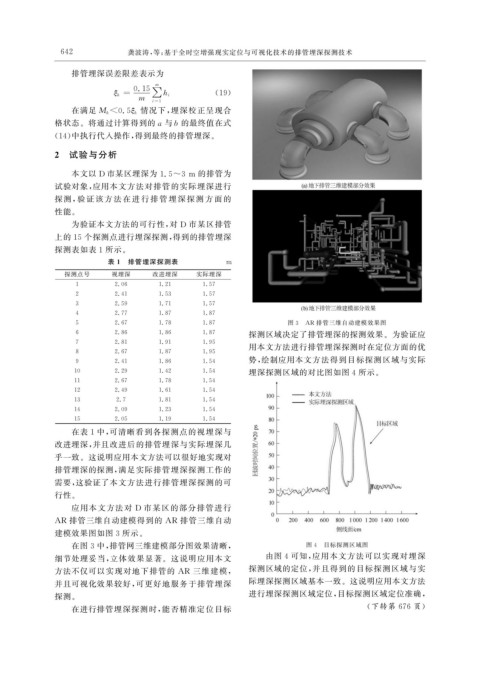
5 2.67 1.78 1.87 图 3 AR 排管三维自动建模效果图
6 2.86 1.86 1.87 探测区域决定了排管埋深的探测效果。为验证应
7 2.81 1.91 1.95
用本文方法进行排管埋深探测时在定位方面的优
8 2.67 1.87 1.95
势, 绘制应用本文方法得到目标探测区域与实际
9 2.41 1.86 1.54
10 2.29 1.42 1.54 埋深探测区域的对比图如图 4 所示。
11 2.67 1.78 1.54
12 2.49 1.61 1.54
13 2.7 1.81 1.54
14 2.09 1.23 1.54
15 2.05 1.19 1.54
在表 1 中, 可清晰看到各探测点的视埋深与
改进埋深, 并且改进后的排管埋深与实际埋深几
乎一致。这说明应用本文方法可以很好地实现对
排管埋深的探测, 满足实际排管埋深探测工作的
需要, 这验证了本文方法进行排管埋深探测的可
行性。
应用本文方法对 D 市某区的部分排管进行
AR 排管三维自动建模得到的 AR 排管三维自动
建模效果图如图 3 所示。
在图 3 中, 排管网三维建模部分图效果清晰, 图 4 目标探测区域图
细节处理妥当, 立体效果显著。这说明应用本文 由图 4 可知, 应用本文方法可以实现对埋深
探测区域的定位, 并且得到的目标探测区域与实
方法不仅可以实现对地下排管的 AR 三维建模,
并且可视化效果较好, 可更好地服务于排管埋深 际埋深探测区域基本一致。这说明应用本文方法
进行埋深探测区域定位, 目标探测区域定位准确,
探测。
在进行排管埋深探测时, 能否精准定位目标 ( 下转第 676 页)