
Page 37 - 电力与能源2022年第四期
P. 37
张 成, 等: 35kV 架空线路带电绝缘涂覆施工技术 3 7
1
( 7 ) 在遥控器上点击“ 自动上线” 键, 涂覆机器
人自动上线。
( 8 ) 涂覆机器人上线后, 点击“ 行走前进”, 前
进一小段距离后停止, 观察行走是否正常。
( 9 ) 点击“ 喷头闭合”, 至完全闭合, 此时“ 开合
停止” 会变绿。
( 10 ) 控制机器人行走至涂覆作业起点, 再次
确认线径大小、 行走速度无误后点击“ 送料前进”
至涂料从喷嘴后溢出, 立即点击“ 行走前进”, 直至
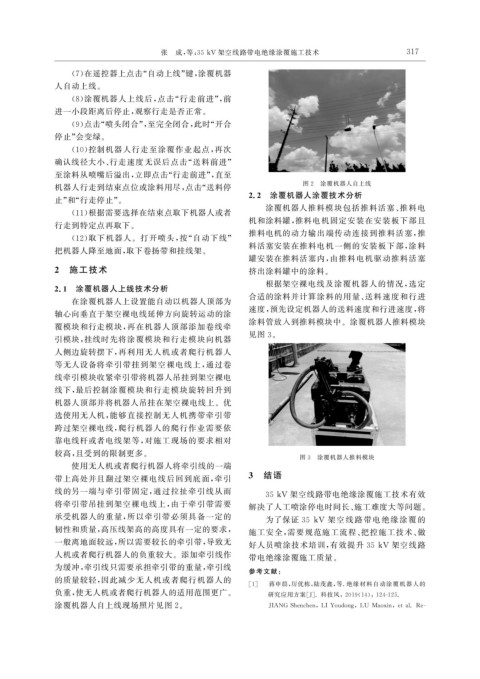
机器人行走到结束点位或涂料用尽, 点击“ 送料停 图 2 涂覆机器人自上线
2.2 涂覆机器人涂覆技术分析
止” 和“ 行走停止”。
涂覆机器人推料模块包括推料活塞、 推料电
( 11 ) 根据需要选择在结束点取下机器人或者
机和涂料罐, 推料电机固定安装在安装板下部且
行走到特定点再取下。
推料电机的动力输出端传动连接到推料活塞, 推
( 12 ) 取下机器人。打开喷头, 按“ 自动下线”
料活塞安装在推料电机一侧的安装板下部, 涂料
把机器人降至地面, 取下卷扬带和挂线架。
罐安装在推料活塞内, 由推料电机驱动推料活塞
2 施工技术 挤出涂料罐中的涂料。
根据架空裸电线及涂覆机器人的情况, 选定
2.1 涂覆机器人上线技术分析
合适的涂料并计算涂料的用量、 送料速度和行进
在涂覆机器人上设置能自动以机器人顶部为
速度, 预先设定机器人的送料速度和行进速度, 将
轴心向垂直于架空裸电线延伸方向旋转运动的涂
涂料管放入到推料模块中。涂覆机器人推料模块
覆模块和行走模块, 再在机器人顶部添加卷线牵
见图 3 。
引模块, 挂线时先将涂覆模块和行走模块向机器
人侧边旋转摆下, 再利用无人机或者爬行机器人
等无人设备将牵引带挂到架空裸电线上, 通过卷
线牵引模块收紧牵引带将机器人吊挂到架空裸电
线下, 最后控制涂覆模块和行走模块旋转回升到
机器人顶部并将机器人吊挂在架空裸电线上。优
选使用无人机, 能够直接控制无人机携带牵引带
跨过架空裸电线, 爬行机器人的爬行作业需要依
靠电线杆或者电线架等, 对施工现场的要求相对
较高, 且受到的限制更多。
图 3 涂覆机器人推料模块
使用无人机或者爬行机器人将牵引线的一端
带上高处并且翻过架空裸电线后回到底面, 牵引 3 结语
线的另一端与牵引带固定, 通过拉扯牵引线从而 35kV 架空线路带电绝缘涂覆施工技术有效
将牵引带吊挂到架空裸电线上, 由于牵引带需要 解决了人工喷涂停电时间长、 施工难度大等问题。
承受机器人的重量, 所以牵引带必须具备一定的 为了保证 35kV 架空线路带电绝缘涂覆的
韧性和质量, 高压线架高的高度具有一定的要求, 施工安全, 需要规范施工流程、 把控施工技术、 做
一般离地面较远, 所以需要较长的牵引带, 导致无 好人员喷涂技术培训, 有效提升 35kV 架空线路
人机或者爬行机器人的负重较大。添加牵引线作
带电绝缘涂覆施工质量。
为缓冲, 牵引线只需要承担牵引带的重量, 牵引线 参考文献:
的质量较轻, 因此减少无人机或者爬行机器人的
[ 1 ] 蒋申晨, 厉优栋, 陆茂鑫, 等 . 绝缘材料自动涂覆机器人的
负重, 使无人机或者爬行机器人的适用范围更广。 研究应用方案[ J ] . 科技风, 2019 ( 14 ): 124-125.
涂覆机器人自上线现场照片见图 2 。 JIANGShenchen , LIYoudon g , LU Maoxin , etal.Re-