
Page 33 - 电力与能源2022年第一期
P. 33
宁 科, 等: 基于多级控制网测量技术的电缆隧道轴线三维数据测量方法 2
7
1 基于多级控制网测量技术的电缆隧道
轴线总体测量方案
当前电缆隧道通道的测量均是由较远处引点
通过测算获得测站点坐标, 根据测站点坐标引点
至隧道井内进行隧道轴线坐标测量。电缆隧道测
量的难点主要在将地面的控制点准确地传递到井
下, 并且验证控制点的正确性和精度以及确定隧
道轴线位置。
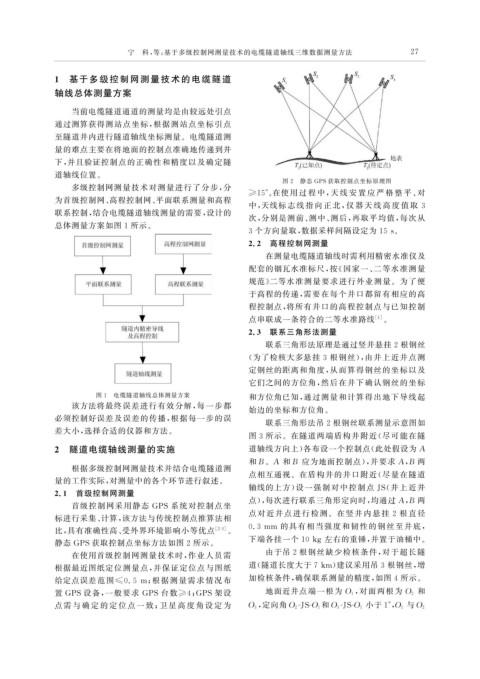
图 2 静态 GPS获取控制点坐标原理图
多级控制网测量技术对测量进行了分步, 分
≥15° 。 在使用 过 程 中, 天 线 安 置 应 严 格 整 平、 对
为首级控制网、 高程控制网、 平面联系测量和高程
中, 天线标 志 线 指 向 正 北, 仪 器 天 线 高 度 值 取 3
联系控制, 结合电缆隧道轴线测量的需要, 设计的
次, 分别是测前、 测中、 测后, 再取平均值, 每次从
总体测量方案如图 1 所示。
3 个方向量取, 数据采样间隔设定为 15s 。
2.2 高程控制网测量
在测量电缆隧道轴线时需利用精密水准仪及
配套的铟瓦水准标尺, 按《 国家一、 二等水准测量
规范》 二等水准测量要求进行外业测量。为了便
于高程的传递, 需要在每个井口都留有相应的高
程控制点, 将所有井口的高程控制点与已知控制
点串联成一条符合的二等水准路线 [ 4 ] 。
2.3 联系三角形法测量
联系三角形法原理是通过竖井悬挂 2 根钢丝
( 为了检核大多悬挂 3 根钢丝), 由井上近井点测
定钢丝的距离和角度, 从而算得钢丝的坐标以及
它们之间的方位角, 然后在井下确认钢丝的坐标
图 1 电缆隧道轴线总体测量方案 和方位角已知, 通过测量和计算得出地下导线起
该方法将最终误差进行有效分解, 每一步都
始边的坐标和方位角。
必须控制好误差及误差的传播, 根据每一步的误
联系三角形法吊 2 根钢丝联系测量示意图如
差大小, 选择合适的仪器和方法。
图 3 所示。在隧道两端盾构井附近( 尽可能在隧
2 隧道电缆轴线测量的实施 道轴线方向上) 各布设一个控制点( 此处假设为 A
和B 。 A 和B 应为地面控制点), 并要求 A , B 两
根据多级控制网测量技术并结合电缆隧道测
点相互通视。在盾构井的井口附近( 尽量在隧道
量的工作实际, 对测量中的各个环节进行叙述。
轴线的上方) 设一强制对中控制点 JS ( 井上近井
2.1 首级控制网测量
点), 每次进行联系三角形定向时, 均通过 A , B 两
首级控制网采用静态 GPS 系统对控制点坐
点对近井点进行检测。在竖井内悬挂 2 根直径
标进行采集、 计算, 该方法与传统控制点推算法相
比, 具有准确性高、 受外界环境影响小等优点 [ 2-3 ] 。 0.3mm 的具有相当强度和韧性的钢丝至井底,
下端各挂一个 10k g 左右的重锤, 并置于油桶中。
静态 GPS 获取控制点坐标方法如图 2 所示。
在使用首级控制网测量技术时, 作业人员需 由于吊 2 根钢丝缺少检核条件, 对于超长隧
根据最近图纸定位测量点, 并保证定位点与图纸 道( 隧道长度大于 7km ) 建议采用吊 3 根钢丝, 增
给定点误差范围 ≤0.5 m ; 根据测量需求情况布 加检核条件, 确保联系测量的精度, 如图 4 所示。
置 GPS 设备, 一般要求 GPS 台数 ≥4 ; GPS 架设 地面近井点端一根为 O 1 对面两根为 O 2 和
,
点需 与 确 定 的 定 位 点 一 致; 卫 星 高 度 角 设 定 为 O 3 定向角O 2 -JS- O 1 和O 3 -JS- O 1 小于1° , O 1 与O 2
,