
Page 25 - 电力与能源2022年第三期
P. 25
陈艳羚, 等: 复合雷达传感在电缆隧道四足机器人避障中的应用 2 5
1
基于各传感器获得的分离观测数据, 通过对数据 为同一时刻的数据, 之后只需进行数据融合即可,
多级别、 多方面组合导出需要的数据 [ 3 ] 。这不仅 而这 3 种传感器 的感知数据都是基于各自的晶
弥补了单个传感器的劣势, 而且也综合处理了不 振, 这些晶振之间多少存在一些误差, 因此需要采
同传感器所采集的数据来提高整个复合雷达传感 用时间近似同步的方法。此外由于近似同步方法
系统的精确度 [ 4 ] 。常用的融合算法一般分为前融 处理得到的数据在频率的精确度上可能会存在误
合算法和后融合算法。前融合算法通过将所有传 差, 所以需要将多个传感器在某一时刻的数据进
感器得到的原始数据进行时间同步、 空间同步融合 行融合。
在一起, 得到 XYZ 空间数据、 RGB 颜色数据、 激光 将双目视觉系统、 毫米波雷达、 激光雷达 3 个
反射值数据、 速度数据等。后融合算法则是每个传 传感器对于同一个物体得到的数据进行同步后,
感器都能够独立处理生成数据, 处理器通过对所有 可以获得该物体在双目视觉系统坐标系、 激光雷
传感器生成的结果进行融合得到最终的结果。 达坐标系、 毫米波雷达坐标系中的坐标, 由于经过
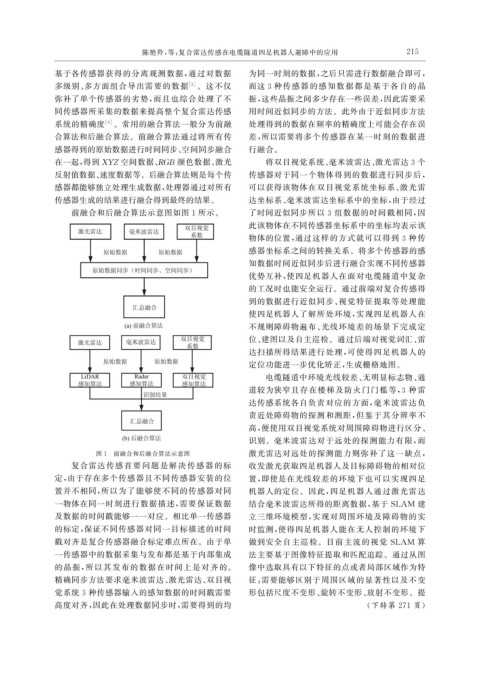
前融合和后融合算法示意图如图 1 所示。 了时间近似同步所以 3 组数据的时间戳相同, 因
此该物体在不同传感器坐标系中的坐标均表示该
物体的位置, 通过这样的方式就可以得到 3 种传
感器坐标系之间的转换关系。将多个传感器的感
知数据时间近似同步后进行融合实现不同传感器
优势互补, 使四足机器人在面对电缆隧道中复杂
的工况时也能安全运行。通过前端对复合传感得
到的数据进行近似同步、 视觉特征提取等处理能
使四足机器人了解所处环境, 实现四足机器人在
不规则障碍物遍布、 光线环境差的场景下完成定
位、 建图以及自主巡检。通过后端对视觉词汇、 雷
达扫描所得结果进行处理, 可使得四足机器人的
定位功能进一步优化矫正, 生成栅格地图。
电缆隧道中环境光线较差、 无明显标志物、 通
道较为狭窄且存在楼梯及防火门门槛等, 3 种雷
达传感系统各自负责对应的方面, 毫米波雷达负
责近处障碍物的探测和测距, 但鉴于其分辨率不
高, 便使用双目视觉系统对周围障碍物进行区分、
识别。毫米波雷达对于远处的探测能力有限, 而
图 1 前融合和后融合算法示意图 激光雷达对远处的探测能力则弥补了这一缺点,
复合雷达传感首要问题是解 决 传 感 器 的 标 收发激光获取四足机器人及目标障碍物的相对位
定, 由于存在多个传感器且不同传感器安装的位 置, 即使是在光线较差的环境下也可以实现四足
置并不相同, 所以为了能够使不同的传感器对同 机器人的定位。因此, 四足机器人通过激光雷达
一物体在同一时刻进行数据描述, 需要保证数据 结合毫米波雷达所得的距离数据, 基于 SLAM 建
及数据的时间戳能够一一对应。相比单一传感器 立三维环境模型, 实现对周围环境及障碍物的实
的标定, 保证不同传感器对同一目标描述的时间 时监测, 使得四足机器人能在无人控制的环境下
戳对齐是复合传感器融合标定难点所在。由于单 做到安全自主巡检。目前主流的视觉 SLAM 算
一传感器中的数据采集与发布都是基于内部集成 法主要基于图像特征提取和匹配追踪。通过从图
的晶振, 所以其发布的数据在时间上是对齐的。 像中选取具有以下特征的点或者局部区域作为特
精确同步方法要求毫米波雷达、 激光雷达、 双目视 征: 需要能够区别于周围区域的显著性以及不变
觉系统 3 种传感器输入的感知数据的时间戳需要 形包括尺度不变形、 旋转不变形、 放射不变形。提
高度对齐, 因此在处理数据同步时, 需要得到的均 ( 下转第 271 页)