
Page 46 - 电力与能源2023年第三期
P. 46
240 苏智超:基于深度学习的风电机组风向预测方法研究
风电机组控制性能优化,关注的重点是各风电机
组历史时刻的风向、偏航系统动作次数、偏航角
度、追风偏航的动作时间等,还关系到风电机组捕
获风能的效率,对其进行深入研究的意义重大。
本文主要阐述如下几个方面的研究成果:风
电场风向预测的具体思路;根据某风电场提供的
实际风数据,详细介绍风数据的清洗整定方法,并
举例论证其效果;提出关联种子选取的基本原则,
结合风机偏航系统实际工作原理提出用风机偏航
事件相关性来筛选预测关联种子,并详细介绍风
机偏航事件相关性的数学模型和求取方法;通过
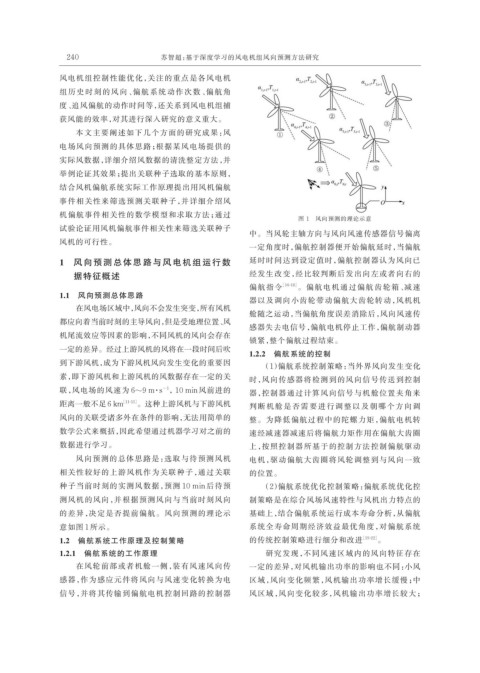
图 1 风向预测的理论示意
试验论证用风机偏航事件相关性来筛选关联种子
中。当风轮主轴方向与风向风速传感器信号偏离
风机的可行性。
一定角度时,偏航控制器便开始偏航延时,当偏航
1 风向预测总体思路与风电机组运行数 延时时间达到设定值时,偏航控制器认为风向已
据特征概述 经发生改变,经比较判断后发出向左或者向右的
偏航指令 [16-18] 。偏航电机通过偏航齿轮箱、减速
1.1 风向预测总体思路
器以及调向小齿轮带动偏航大齿轮转动,风机机
在风电场区域中,风向不会发生突变,所有风机
舱随之运动,当偏航角度误差消除后,风向风速传
都应向着当前时刻的主导风向,但是受地理位置、风
感器失去电信号,偏航电机停止工作,偏航制动器
机尾流效应等因素的影响,不同风机的风向会存在
锁紧,整个偏航过程结束。
一定的差异。经过上游风机的风将在一段时间后吹
1.2.2 偏航系统的控制
到下游风机,成为下游风机风向发生变化的重要因
(1)偏航系统控制策略:当外界风向发生变化
素,即下游风机和上游风机的风数据存在一定的关 时,风向传感器将检测到的风向信号传送到控制
联,风电场的风速为 6~9 m·s , 10 min 风前进的 器,控制器通过计算风向信号与机舱位置夹角来
−1
距离一般不足 6 km [11-15] 。这种上游风机与下游风机 判断机舱是否需要进行调整以及朝哪个方向调
风向的关联受诸多外在条件的影响,无法用简单的 整。为降低偏航过程中的陀螺力矩,偏航电机转
数学公式来概括,因此希望通过机器学习对之前的 速经减速器减速后将偏航力矩作用在偏航大齿圈
数据进行学习。 上,按照控制器所基于的控制方法控制偏航驱动
风向预测的总体思路是:选取与待预测风机 电机,驱动偏航大齿圈将风轮调整到与风向一致
相关性较好的上游风机作为关联种子,通过关联 的位置。
种子当前时刻的实测风数据,预测 10 min 后待预 (2)偏航系统优化控制策略:偏航系统优化控
测风机的风向,并根据预测风向与当前时刻风向 制策略是在综合风场风速特性与风机出力特点的
的差异,决定是否提前偏航。风向预测的理论示 基础上,结合偏航系统运行成本寿命分析,从偏航
意如图 1 所示。 系统全寿命周期经济效益最优角度,对偏航系统
1.2 偏航系统工作原理及控制策略 的传统控制策略进行细分和改进 [19-22] 。
1.2.1 偏航系统的工作原理 研究发现,不同风速区域内的风向特征存在
在风轮前部或者机舱一侧,装有风速风向传 一定的差异,对风机输出功率的影响也不同:小风
感器,作为感应元件将风向与风速变化转换为电 区域,风向变化频繁,风机输出功率增长缓慢;中
信号,并将其传输到偏航电机控制回路的控制器 风区域,风向变化较多,风机输出功率增长较大;