
Page 47 - 电力与能源2023年第三期
P. 47
苏智超:基于深度学习的风电机组风向预测方法研究 241
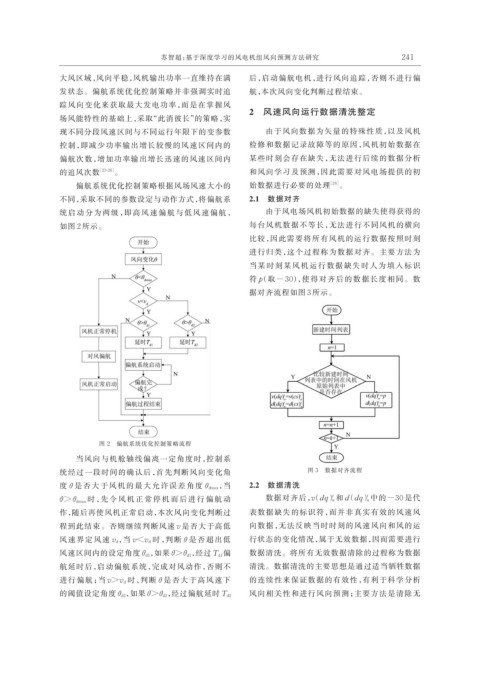
大风区域,风向平稳,风机输出功率一直维持在满 后,启动偏航电机,进行风向追踪,否则不进行偏
发状态。偏航系统优化控制策略并非强调实时追 航,本次风向变化判断过程结束。
踪风向变化来获取最大发电功率,而是在掌握风
2 风速风向运行数据清洗整定
场风能特性的基础上,采取“此消彼长”的策略,实
现不同分段风速区间与不同运行年限下的变参数 由于风向数据为矢量的特殊性质,以及风机
控制,即减少功率输出增长较慢的风速区间内的 检修和数据记录故障等的原因,风机初始数据在
偏航次数,增加功率输出增长迅速的风速区间内 某些时刻会存在缺失,无法进行后续的数据分析
的追风次数 [23-26] 。 和风向学习及预测,因此需要对风电场提供的初
偏航系统优化控制策略根据风场风速大小的 始数据进行必要的处理 [26] 。
不同,采取不同的参数设定与动作方式,将偏航系 2.1 数据对齐
统启动分为两级,即高风速偏航与低风速偏航, 由于风电场风机初始数据的缺失使得获得的
如图 2 所示。 每台风机数据不等长,无法进行不同风机的横向
比较,因此需要将所有风机的运行数据按照时刻
进行归类,这个过程称为数据对齐。主要方法为
当某时刻某风机运行数据缺失时人为填入标识
符 p(取−30),使得对齐后的数据长度相同。数
据对齐流程如图 3 所示。
图 2 偏航系统优化控制策略流程
当风向与机舱轴线偏离一定角度时,控制系
统经过一段时间的确认后,首先判断风向变化角 图 3 数据对齐流程
度 θ 是否大于风机的最大允许误差角度 θ dmax,当 2.2 数据清洗
t
t
θ> θ dmax 时 ,先 令 风 机 正 常 停 机 而 后 进 行 偏 航 动 数据对齐后, v ( dq ) n 和 d ( dq ) n 中的−30 是代
作,随后再使风机正常启动,本次风向变化判断过 表数据缺失的标识符,而并非真实有效的风速风
程到此结束。否则继续判断风速 v 是否大于高低 向数据,无法反映当时时刻的风速风向和风的运
风速界定风速 v d,当 v<v d 时,判断 θ 是否超出低 行状态的变化情况,属于无效数据,因而需要进行
风速区间内的设定角度 θ d1,如果 θ>θ d1,经过 T d1 偏 数据清洗。将所有无效数据清除的过程称为数据
航延时后,启动偏航系统,完成对风动作,否则不 清洗。数据清洗的主要思想是通过适当牺牲数据
进行偏航;当 v>v d 时,判断 θ 是否大于高风速下 的连续性来保证数据的有效性,有利于科学分析
风向相关性和进行风向预测;主要方法是清除无
的阈值设定角度 θ d2,如果 θ>θ d2,经过偏航延时 T d2