
Page 47 - 电力与能源2023年第五期
P. 47
王俊豪,等:一种新型不停电作业绝缘辅助装置 469
采 用 杠 杆 原 理 进 行 受 力 分 析 ,如 图 2 所 示 。
在实际使用过程中,装置主要分为静止时受力和
行进间受力 [6-9] 。
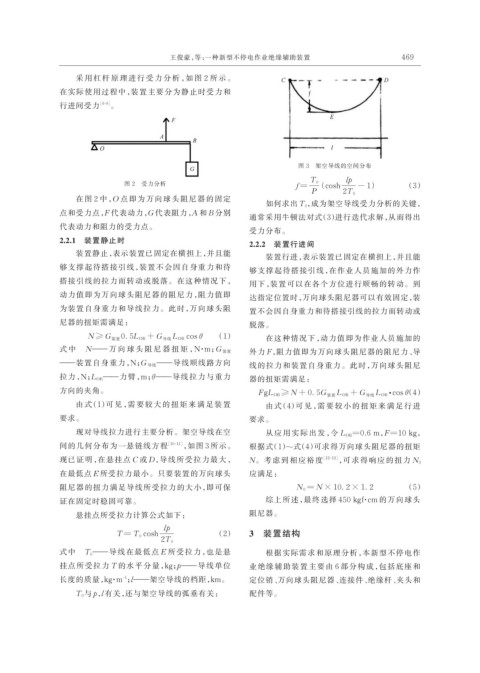
图 3 架空导线的空间分布
lp
图 2 受力分析 f = T 0 ( cosh - 1 ) (3)
P 2T 0
在图 2 中,O 点即为万向球头阻尼器的固定
如何求出 T 0,成为架空导线受力分析的关键,
点和受力点,F 代表动力,G 代表阻力,A 和 B 分别
通常采用牛顿法对式(3)进行迭代求解,从而得出
代表动力和阻力的受力点。
受力分布。
2.2.1 装置静止时
2.2.2 装置行进间
装置静止,表示装置已固定在横担上,并且能
装置行进,表示装置已固定在横担上,并且能
够支撑起待搭接引线,装置不会因自身重力和待 够支撑起待搭接引线,在作业人员施加的外力作
搭接引线的拉力而转动或脱落。在这种情况下, 用下,装置可以在各个方位进行顺畅的转动。到
动力值即为万向球头阻尼器的阻尼力,阻力值即 达指定位置时,万向球头阻尼器可以有效固定,装
为装置自身重力和导线拉力。此时,万向球头阻 置不会因自身重力和待搭接引线的拉力而转动或
尼器的扭矩需满足: 脱落。
N ≥ G 装置 0. 5L OB + G 导线 L OB cos θ (1) 在这种情况下,动力值即为作业人员施加的
式 中 N—— 万 向 球 头 阻 尼 器 扭 矩 ,N·m;G 装置 外力 F,阻力值即为万向球头阻尼器的阻尼力、导
——装置自身重力,N;G 导线 ——导线顺线路方向 线的拉力和装置自身重力。此时,万向球头阻尼
拉力,N;L OB——力臂,m;θ——导线拉力与重力 器的扭矩需满足:
方向的夹角。 FgL OB ≥ N + 0. 5G 装置 L OB + G 导线 L OB ⋅ cos θ(4)
由式(1)可见,需要较大的扭矩来满足装置 由式(4)可见,需要较小的扭矩来满足行进
要求。 要求。
现对导线拉力进行主要分析。架空导线在空 从应用实际出发,令 L OB=0.6 m,F=10 kg,
间的几何分布为一悬链线方程 [10-11] ,如图 3 所示。 根据式(1)~式(4)可求得万向球头阻尼器的扭矩
现已证明,在悬挂点 C 或 D,导线所受拉力最大, N。考虑到相应裕度 [12-13] ,可求得响应的扭力 N 0
在最低点 E 所受拉力最小。只要装置的万向球头 应满足:
阻尼器的扭力满足导线所受拉力的大小,即可保 N 0 = N × 10. 2 × 1. 2 (5)
证在固定时稳固可靠。 综上所述,最终选择 450 kgf·cm 的万向球头
悬挂点所受拉力计算公式如下: 阻尼器。
lp
T = T 0 cosh (2) 3 装置结构
2T 0
式中 T 0——导线在最低点 E 所受拉力,也是悬 根据实际需求和原理分析,本新型不停电作
挂点所受拉力 T 的水平分量,kg;p——导线单位 业绝缘辅助装置主要由 6 部分构成,包括底座和
长度的质量,kg·m ;l——架空导线的档距,km。 定位销、万向球头阻尼器、连接件、绝缘杆、夹头和
-1
T 0 与 p,l有关,还与架空导线的弧垂有关: 配件等。