
Page 74 - 电力与能源2023年第六期
P. 74
620 白荣格,等:基于改进花授粉算法的光伏最大功率点追踪研究
得到的追踪结果一致。
将光伏阵列按照表 1 中的方案 2 进行设置,分
别对 IFPA 和 FPA 进行仿真验证,得到仿真结果
如图 5 所示。
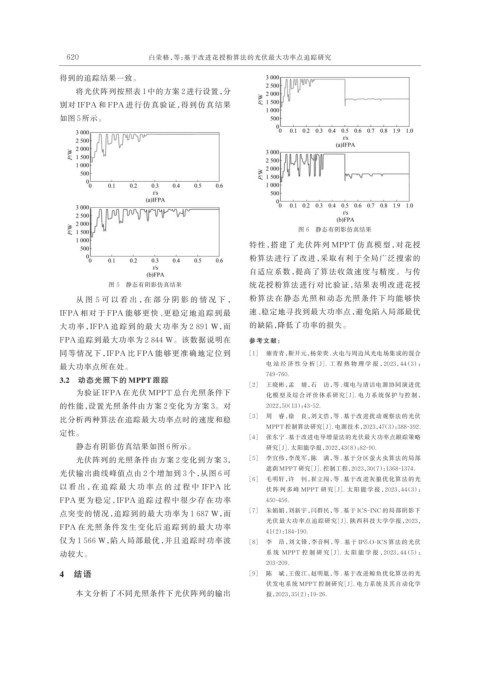
图 6 静态有阴影仿真结果
特性,搭建了光伏阵列 MPPT 仿真模型,对花授
粉算法进行了改进,采取有利于全局广泛搜索的
自适应系数,提高了算法收敛速度与精度。与传
图 5 静态有阴影仿真结果 统花授粉算法进行对比验证,结果表明改进花授
从 图 5 可 以 看 出 ,在 部 分 阴 影 的 情 况 下 , 粉算法在静态光照和动态光照条件下均能够快
IFPA 相对于 FPA 能够更快、更稳定地追踪到最 速、稳定地寻找到最大功率点,避免陷入局部最优
大功率,FPA 追踪到的最大功率为 2 891 W,而 的缺陷,降低了功率的损失。
I
FPA 追踪到最大功率为 2 844 W。该数据说明在 参考文献:
同等情况下,FPA 比 FPA 能够更准确地定位到 [1] 雍青青,靳开元,杨荣贵 . 火电与周边风光电场集成的混合
I
.
最大功率点所在处。 电 站 经 济 性 分 析[J] 工 程 热 物 理 学 报 ,2023,44(3):
749-760.
3.2 动态光照下的 MPPT 跟踪
[2] 王晓彬,孟 婧,石 访,等 . 煤电与清洁电源协同演进优
为验证 IFPA 在光伏 MPPT 总台光照条件下 化模型及综合评价体系研究[J] 电力系统保护与控制,
.
的性能,设置光照条件由方案 2 变化为方案 3。对 2022,50(13):43-52.
[3] 周 睿,徐 良,刘文浩,等 . 基于改进扰动观察法的光伏
比分析两种算法在追踪最大功率点时的速度和稳
.
MPPT 控制算法研究[J] 电源技术,2023,47(3):388-392.
定性。
[4] 张东宁 . 基于改进电导增量法的光伏最大功率点跟踪策略
静态有阴影仿真结果如图 6 所示。 研究[J] 太阳能学报,2022,43(8):82-90.
.
光伏阵列的光照条件由方案 2 变化到方案 3, [5] 李宜伟,李茂军,陈 满,等 . 基于分区萤火虫算法的局部
遮荫 MPPT 研究[J] 控制工程,2023,30(7):1368-1374.
.
光伏输出曲线峰值点由 2 个增加到 3 个,从图 6 可
[6] 毛明轩,许 钊,崔立闯,等 . 基于改进灰狼优化算法的光
以 看 出 ,在 追 踪 最 大 功 率 点 的 过 程 中 IFPA 比 伏 阵 列 多 峰 MPPT 研 究[J] 太 阳 能 学 报 ,2023,44(3):
.
FPA 更为稳定,FPA 追踪过程中很少存在功率 450-456.
I
点突变的情况,追踪到的最大功率为 1 687 W,而 [7] 朱娟娟,刘新宇,闫群民,等 . 基于 ICS-INC 的局部阴影下
光伏最大功率点追踪研究[J] 陕西科技大学学报,2023,
.
FPA 在光照条件发生变化后追踪到的最大功率
41(2):184-190.
仅为 1 566 W,陷入局部最优,并且追踪时功率波 [8] 李 昂,刘文锋,李音柯,等 . 基于 IP&O-ICS 算法的光伏
动较大。 系 统 MPPT 控 制 研 究[J] 太 阳 能 学 报 ,2023,44(5):
.
203-209.
4 结语 [9] 陈 斌,王俊江,赵明胤,等 . 基于改进鲸鱼优化算法的光
.
伏发电系统 MPPT 控制研究[J] 电力系统及其自动化学
本文分析了不同光照条件下光伏阵列的输出 报,2023,35(2):19-26.