
Page 101 - 电力与能源2024年第四期
P. 101
王紫威:变电站视觉检修技术中相机标定方法研究 495
ìf u = f/dx
ï ï
í (7)
ï ï f v = f/dy
î
式中 P——投影矩阵;P 1——内参矩阵;P 2——
外参矩阵。
1.2 张正友标定法
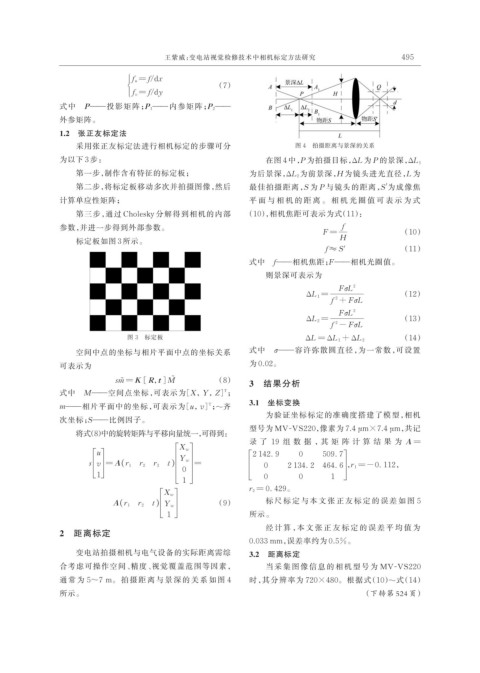
采用张正友标定法进行相机标定的步骤可分 图 4 拍摄距离与景深的关系
为以下 3 步: 在图 4 中,P 为拍摄目标,ΔL 为 P 的景深,ΔL 1
第一步,制作含有特征的标定板; 为后景深,ΔL 2 为前景深,H 为镜头进光直径,L 为
第二步,将标定板移动多次并拍摄图像,然后 最佳拍摄距离,S 为 P 与镜头的距离,S′为成像焦
计算单应性矩阵; 平 面 与 相 机 的 距 离 。 相 机 光 圈 值 可 表 示 为 式
第三步,通过 Cholesky 分解得到相机的内部 (10),相机焦距可表示为式(11):
参数,并进一步得到外部参数。 f
F = (10)
标定板如图 3 所示。 H
f ≈ S′ (11)
式中 f——相机焦距;F——相机光圈值。
则景深可表示为
FσL 2
ΔL 1 = (12)
f + FσL
2
FσL 2
ΔL 2 = (13)
f - FσL
2
图 3 标定板 ΔL = ΔL 1 + ΔL 2 (14)
空间中点的坐标与相片平面中点的坐标关系 式中 σ——容许弥散圆直径,为一常数,可设置
可表示为 为 0.02。
sm ͂ = K [ R, ] M ͂ (8) 3 结果分析
t
式中 M——空间点坐标,可表示为[X, Y, Z];
T
3.1 坐标变换
T
m——相片平面中的坐标,可表示为[u, v];~齐
为验证坐标标定的准确度搭建了模型,相机
次坐标;S——比例因子。
型号为 MV-VS220,像素为 7.4 μm×7.4 μm,共记
将式(8)中的旋转矩阵与平移向量统一,可得到:
录 了 19 组 数 据 ,其 矩 阵 计 算 结 果 为 A =
ù
é ù u ú ê ê é X w ú ú ú ú ê é2 142. 9 0 509. ú ú ù 7
ê ê ú
ê ê
ê
ú
ê ê ú ú ê ê 0 ê ê ú ú
s ê ê ú v = A(r 1 r 2 r 3 t) ê ê Y w ú ú = ê ê 0 2 134. 2 464. ú ú 6 , r 1 =-0. 112,
ë û 1 ê ê ú ú ë 0 0 1 û
ë 1 û
ê ê é X w ù ú ú r 2 = 0. 429。
ê ú ú 标 尺 标 定 与 本 文 张 正 友 标 定 的 误 差 如 图 5
ê ê
A(r 1 r 2 t) êY w ú ú (9)
ë 1 û 所示。
经 计 算 ,本 文 张 正 友 标 定 的 误 差 平 均 值 为
2 距离标定
0.033 mm,误差率约为 0.5%。
变电站拍摄相机与电气设备的实际距离需综 3.2 距离标定
合考虑可操作空间、精度、视觉覆盖范围等因素, 当采集图像信息的相机型号为 MV-VS220
通 常 为 5~7 m。 拍 摄 距 离 与 景 深 的 关 系 如 图 4 时,其分辨率为 720×480。根据式(10)~式(14)
所示。 (下转第 524 页)