
Page 44 - 电力与能源2024年第六期
P. 44
680 朱正一,等:基于轨道式巡检机器人的换流阀部件红外测温方法
体的发射率,并利用红外传感器测量得到物体的 根据云台角度信息调整云台,加载相机参数对待
辐射出射度,就可计算得到物体的表面温度。 检物体进行拍摄获取巡检图像。由于巡检图像与
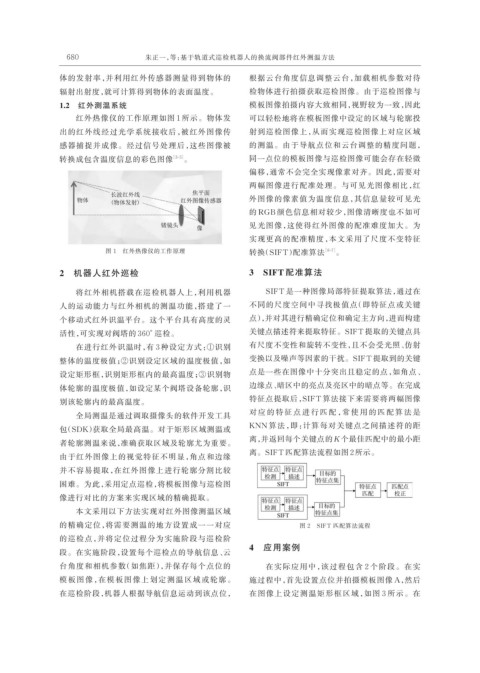
1.2 红外测温系统 模板图像拍摄内容大致相同,视野较为一致,因此
红外热像仪的工作原理如图 1 所示。物体发 可以轻松地将在模板图像中设定的区域与轮廓投
出的红外线经过光学系统接收后,被红外图像传 射到巡检图像上,从而实现巡检图像上对应区域
感器捕捉并成像。经过信号处理后,这些图像被 的测温。由于导航点位和云台调整的精度问题,
转换成包含温度信息的彩色图像 [3-5] 。 同一点位的模板图像与巡检图像可能会存在轻微
偏移,通常不会完全实现像素对齐。因此,需要对
两幅图像进行配准处理。与可见光图像相比,红
外图像的像素值为温度信息,其信息量较可见光
的 RGB 颜色信息相对较少,图像清晰度也不如可
见光图像,这使得红外图像的配准难度加大。为
实现更高的配准精度,本文采用了尺度不变特征
图 1 红外热像仪的工作原理 转换(SIFT)配准算法 [6-7] 。
2 机器人红外巡检 3 SIFT 配准算法
将红外相机搭载在巡检机器人上,利用机器 SIFT 是一种图像局部特征提取算法,通过在
人的运动能力与红外相机的测温功能,搭建了一 不同的尺度空间中寻找极值点(即特征点或关键
个移动式红外识温平台。这个平台具有高度的灵 点),并对其进行精确定位和确定主方向,进而构建
活性,可实现对阀塔的 360° 巡检。 关键点描述符来提取特征。SIFT 提取的关键点具
在进行红外识温时,有 3 种设定方式:①识别 有尺度不变性和旋转不变性,且不会受光照、仿射
整体的温度极值;②识别设定区域的温度极值,如 变换以及噪声等因素的干扰。SIFT 提取到的关键
设定矩形框,识别矩形框内的最高温度;③识别物 点是一些在图像中十分突出且稳定的点,如角点、
体轮廓的温度极值,如设定某个阀塔设备轮廓,识 边缘点、暗区中的亮点及亮区中的暗点等。在完成
别该轮廓内的最高温度。 特征点提取后,SIFT 算法接下来需要将两幅图像
全局测温是通过调取摄像头的软件开发工具 对 应 的 特 征 点 进 行 匹 配 ,常 使 用 的 匹 配 算 法 是
KNN 算法,即:计算每对关键点之间描述符的距
包(SDK)获取全局最高温。对于矩形区域测温或
离,并返回每个关键点的 K 个最佳匹配中的最小距
者轮廓测温来说,准确获取区域及轮廓尤为重要。
离。SIFT 匹配算法流程如图 2所示。
由于红外图像上的视觉特征不明显,角点和边缘
并不容易提取,在红外图像上进行轮廓分割比较
困难。为此,采用定点巡检,将模板图像与巡检图
像进行对比的方案来实现区域的精确提取。
本文采用以下方法实现对红外图像测温区域
的精确定位,将需要测温的地方设置成一一对应 图 2 SIFT 匹配算法流程
的巡检点,并将定位过程分为实施阶段与巡检阶
4 应用案例
段。在实施阶段,设置每个巡检点的导航信息、云
台角度和相机参数(如焦距),并保存每个点位的 在实际应用中,该过程包含 2 个阶段。在实
模板图像,在模板图像上划定测温区域或轮廓。 施过程中,首先设置点位并拍摄模板图像 A,然后
在巡检阶段,机器人根据导航信息运动到该点位, 在图像上设定测温矩形框区域,如图 3 所示。在