
Page 74 - 电力与能源2024年第六期
P. 74
710 汪 洋,等:船舶岸电光伏发电系统最大功率点跟踪控制策略
跟踪控制的策略分析。码头处的气候环境往往多
变,并且岸侧的船舶用电功率具有很大的不确定
性,因此研究如何使新能源发电装置来稳定地为靠
港船舶提供电能具有十分重要的意义。
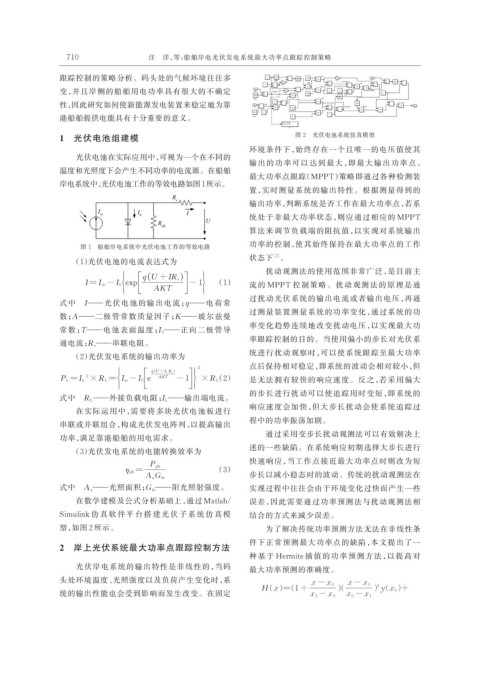
1 光伏电池组建模 图 2 光伏电池系统仿真模型
环境条件下,始终存在一个且唯一的电压值使其
光伏电池在实际应用中,可视为一个在不同的
输出的功率可以达到最大,即最大输出功率点。
温度和光照度下会产生不同功率的电流源。在船舶
最大功率点跟踪(MPPT)策略即通过各种检测装
岸电系统中,光伏电池工作的等效电路如图1所示。
置,实时测量系统的输出特性。根据测量得到的
输出功率,判断系统是否工作在最大功率点,若系
统处于非最大功率状态,则应通过相应的 MPPT
算法来调节负载端的阻抗值,以实现对系统输出
功率的控制,使其始终保持在最大功率点的工作
图 1 船舶岸电系统中光伏电池工作的等效电路
[3]
状态下 。
(1)光伏电池的电流表达式为
ì é q(U + IR s ù ú ü 扰动观测法的使用范围非常广泛,是目前主
ï ï
) ú
ê ê
I = I sc - I 0íexp ê ê ú ú - 1ý (1) 流的 MPPT 控制策略。扰动观测法的原理是通
ï ï ë AKT û ï ï
þ
î
过扰动光伏系统的输出电流或者输出电压,再通
式中 I——光伏电池的输出电流;q——电荷常
过测量装置测量系统的功率变化,通过系统的功
数;A——二极管常数质量因子;K——玻尔兹曼
率变化趋势连续地改变扰动电压,以实现最大功
常数;T——电池表面温度; I 0——正向二极管导
率跟踪控制的目的。当使用偏小的步长对光伏系
通电流; R s——串联电阻。
统进行扰动观察时,可以使系统跟踪至最大功率
(2)光伏发电系统的输出功率为
点后保持相对稳定,即系统的波动会相对较小,但
2
ì é ê ê q(U + I L R s ) ùü
ú ú
ú
2
ê
P L = I L × R L = íI sc - I 0ê e AKT - 1ú ý × R L (2) 是无法拥有较快的响应速度。反之,若采用偏大
î ë û þ
的步长进行扰动可以使追踪用时变短,即系统的
式中 R L——外接负载电阻; I L——输出端电流。
响应速度会加快,但大步长扰动会使系统追踪过
在实际运用中,需要将多块光伏电池板进行
程中的功率振荡加剧。
串联或并联组合,构成光伏发电阵列,以提高输出
通过采用变步长扰动观测法可以有效解决上
功率,满足靠港船舶的用电需求。
述的一些缺陷。在系统响应初期选择大步长进行
(3)光伏发电系统的电能转换效率为
快速响应,当工作点接近最大功率点时则改为短
P ph
η ph = (3)
A α G in 步长以减小稳态时的波动。传统的扰动观测法在
式中 A α——光照面积; G in——阳光照射强度。 实现过程中往往会由于环境变化过快而产生一些
在数学建模及公式分析基础上,通过 Matlab/ 误差,因此需要通过功率预测法与扰动观测法相
Simulink 仿 真 软 件 平 台 搭 建 光 伏 子 系 统 仿 真 模 结合的方式来减少误差。
型,如图 2 所示。 为了解决传统功率预测方法无法在非线性条
件下正常预测最大功率点的缺陷,本文提出了一
2 岸上光伏系统最大功率点跟踪控制方法
种基于 Hermite 插值的功率预测方法,以提高对
光伏岸电系统的输出特性是非线性的,当码 最大功率预测的准确度。
头处环境温度、光照强度以及负荷产生变化时,系
x - x 0 x - x 1 2
H ( x )=(1 + )( ) y ( x 0 )+
统的输出性能也会受到影响而发生改变。在固定 x 1 - x 0 x 0 - x 1