
Page 75 - 电力与能源2024年第六期
P. 75
汪 洋,等:船舶岸电光伏发电系统最大功率点跟踪控制策略 711
应 速 度 ,又 可 以 消 除 固 定 步 长 带 来 的 稳 态 振 荡
x - x 1 x - x 0
2
(1 + 2 )( ) y ( x 1 )+ (4)
x 0 - x 1 x 1 - x 0 误差。
x - x 1
2
( x - x 0 )( ) y'( x 0 )+
x 0 - x 1 3 仿真分析
x - x 0
2
( x - x 1 )( ) y'( x 1 ) 仿真条件设定为:在 1 s 时刻光伏电池温度从
x 1 - x 0
现将三次 Hermite 插值函数中的具体参数进 25 ℃下降至 20 ℃,并且光照强度由 1 000 W·m —2
dP 突变至 1 200 W·m 。此条件的变化是为了模拟
—2
k
行设定:T 时刻,令 = y'( x 0 );在(k+1/2)T 时
dU 码头环境受到港口多变气候影响的特殊场景,即
dP
刻 ,令 = y'( x 1 )。 同 时 设 定 x 0 = k, x 1 = k + 夏天气温升高,但是港口的光照强度由于乌云导
dU
致骤降;冬季时气温变低,但是阳光直射在港口光
1/2, x = k + 1。将这些值代入式(4)并化简,即可
照强度依旧很高。
得到新的 P 1 ( k )'表达式:
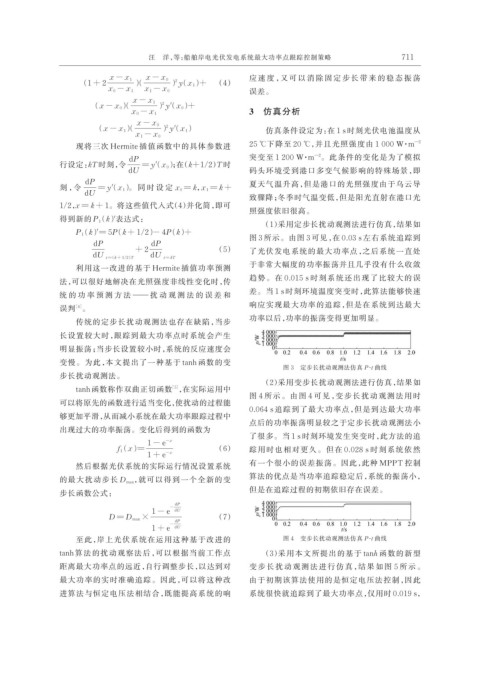
(1)采用定步长扰动观测法进行仿真,结果如
P 1 ( k )'= 5P ( k + 1/2 )- 4P ( k )+ 图 3 所示。由图 3 可见,在 0.03 s 左右系统追踪到
dP dP
+ 2 (5) 了光伏发电系统的最大功率点,之后系统一直处
dU t =( k + 1/2 )T dU t = kT
于非常大幅度的功率振荡并且几乎没有什么收敛
利用这一改进的基于 Hermite 插值功率预测
趋势。在 0.015 s 时刻系统还出现了比较大的误
法,可以很好地解决在光照强度非线性变化时,传
统 的 功 率 预 测 方 法 —— 扰 动 观 测 法 的 误 差 和 差。当 1 s 时刻环境温度突变时,此算法能够快速
[4]
误判 。 响应实现最大功率的追踪,但是在系统到达最大
功率以后,功率的振荡变得更加明显。
传统的定步长扰动观测法也存在缺陷,当步
长设置较大时,跟踪到最大功率点时系统会产生
明显振荡;当步长设置较小时,系统的反应速度会
变慢。为此,本文提出了一种基于 tanh 函数的变
图 3 定步长扰动观测法仿真 P-t 曲线
步长扰动观测法。
(2)采用变步长扰动观测法进行仿真,结果如
[5]
tanh 函数称作双曲正切函数 ,在实际运用中
图 4 所示。由图 4 可见,变步长扰动观测法用时
可以将原先的函数进行适当变化,使扰动的过程能
0.064 s 追踪到了最大功率点,但是到达最大功率
够更加平滑,从而减小系统在最大功率跟踪过程中
点后的功率振荡明显较之于定步长扰动观测法小
出现过大的功率振荡。变化后得到的函数为
了很多。当 1 s 时刻环境发生突变时,此方法的追
-x
1 - e
f 1 ( x )= -x (6) 踪用时也相对更久。但在 0.028 s 时刻系统依然
1 + e
然后根据光伏系统的实际运行情况设置系统 有一个很小的误差振荡。因此,此种 MPPT 控制
的最大扰动步长 D max,就可以得到一个全新的变 算法的优点是当功率追踪稳定后,系统的振荡小,
但是在追踪过程的初期依旧存在误差。
步长函数公式:
dP
- dU
1 - e
D = D max × dP (7)
- dU
1 + e
至此,岸上光伏系统在运用这种基于改进的 图 4 变步长扰动观测法仿真 P-t 曲线
tanh 算法的扰动观察法后,可以根据当前工作点 (3)采用本文所提出的基于 tanh 函数的新型
距离最大功率点的远近,自行调整步长,以达到对 变步长扰动观测法进行仿真,结果如图 5 所示。
最大功率的实时准确追踪。因此,可以将这种改 由于初期该算法使用的是恒定电压法控制,因此
进算法与恒定电压法相结合,既能提高系统的响 系统很快就追踪到了最大功率点,仅用时 0.019 s,