
Page 109 - 电力与能源2021年第五期
P. 109
胡 俊, 等: 变电站高压开关柜智能手车操作工具研究 6 1
0
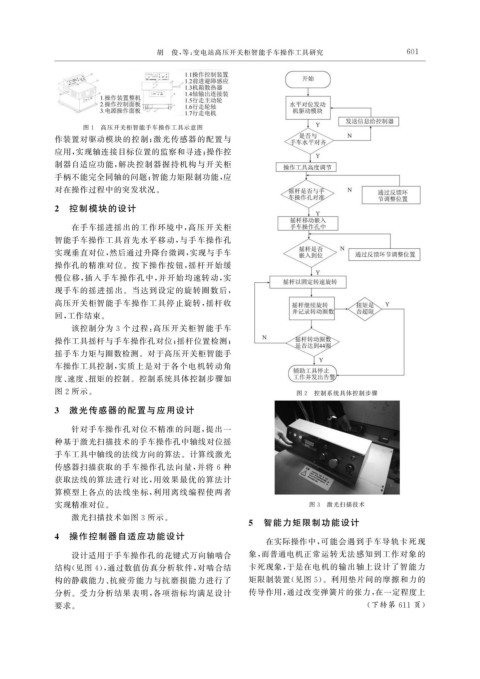
图 1 高压开关柜智能手车操作工具示意图
作装置对驱动模块的控制; 激光传感器的配置与
应用, 实现轴连接目标位置的监察和寻迹; 操作控
制器自适应功能, 解决控制器握持机构与开关柜
手柄不能完全同轴的问题; 智能力矩限制功能, 应
对在操作过程中的突发状况。
2 控制模块的设计
在手车摇进摇出的工作环境中, 高压开关柜
智能手车操作工具首先水平移动, 与手车操作孔
实现垂直对位, 然后通过升降台微调, 实现与手车
操作孔的精准对位。按下操作按钮, 摇杆开始缓
慢位移, 插入手车操作孔中, 并开始均速转动, 实
现手车的摇进摇出。当达到设定的旋转圈数后,
高压开关柜智能手车操作工具停止旋转, 摇杆收
回, 工作结束。
该控制分为 3 个过程: 高压开关柜智能手车
操作工具摇杆与手车操作孔对位; 摇杆位置检测;
摇手车力矩与圈数检测。对于高压开关柜智能手
车操作工具控制, 实质上是对于各个电机转动角
度、 速度、 扭矩的控制。控制系统具体控制步骤如
图 2 所示。 图 2 控制系统具体控制步骤
3 激光传感器的配置与应用设计
针对手车操作孔对位不精准的问题, 提出一
种基于激光扫描技术的手车操作孔中轴线对位摇
手车工具中轴线的法线方向的算法。计算线激光
传感器扫描获取的手车操作孔法向量, 并将 6 种
获取法线的算法进行对比, 用效果最优的算法计
算模型上各点的法线坐标, 利用离线编程使两者
实现精准对位。 图 3 激光扫描技术
激光扫描技术如图 3 所示。
5 智能力矩限制功能设计
4 操作控制器自适应功能设计 在实际操作中, 可能会遇到手车导轨卡死现
设计适用于手车操作孔的花键式万向轴啮合 象, 而普通电机正常运转无法感知到工作对象的
结构( 见图 4 ), 通过数值仿真分析软件, 对啮合结 卡死现象, 于是在电机的输出轴上设计了智能力
构的静载能力、 抗疲劳能力与抗磨损能力进行了 矩限制装置( 见图 5 )。利用垫片间的摩擦和力的
分析。受力分析结果表明, 各项指标均满足设计 传导作用, 通过改变弹簧片的张力, 在一定程度上
要求。 ( 下转第 611 页)