
Page 76 - 电力与能源2022年第一期
P. 76
7 0 董飞英: 火电厂灰库安全清理机器人控制系统设计
图 2 灰库储灰层板底
放孔辅助吊装装置的快装机构实现机器人与库顶
释放孔的刚性连接, 配合辅助支撑装置实现机器
人在灰库的稳固安装, 通过竖管快速地连接下放
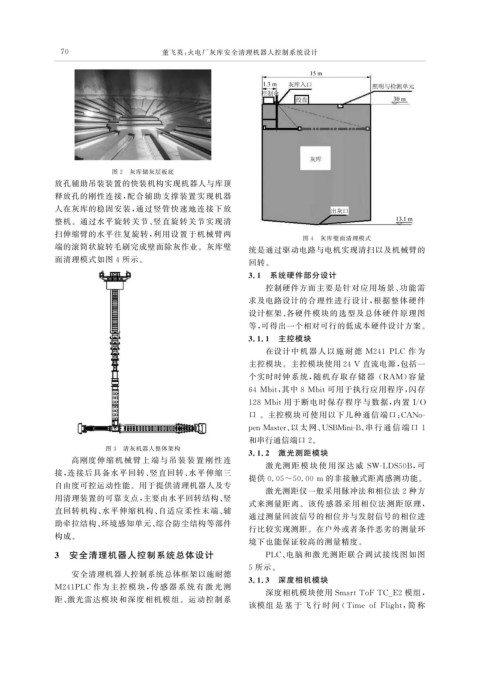
整机。通过水平旋转关节、 竖直旋转关节实现清
扫伸缩臂的水平往复旋转, 利用设置于机械臂两
图 4 灰库璧面清理模式
端的滚筒状旋转毛刷完成壁面除灰作业。灰库璧 统是通过驱动电路与电机实现清扫以及机械臂的
面清理模式如图 4 所示。
回转。
3.1 系统硬件部分设计
控制硬件方面主要是针对应用场景、 功能需
求及电路设计的合理性进行设计, 根据整体硬件
设计框架、 各硬件模块的选型及总体硬件原理图
等, 可得出一个相对可行的低成本硬件设计方案。
3.1.1 主控模块
在设计中机器人以 施 耐 德 M241PLC 作 为
主控模块。主控模块使用24V 直流电源, 包括一
个实时时钟系统, 随机存取存储器 ( RAM ) 容量
64Mbit , 其中 8Mbit可用于执行应用程序, 闪存
128Mbit用于断电时保存程序与数据, 内置 I / O
口 。主控模块可使用以下几种通信端口: CANo-
p enMaster 、 以太网、 USBMini-B 、 串 行 通 信 端 口 1
和串行通信端口2 。
图 3 清灰机器人整体架构
3.1.2 激光测距模块
高刚度伸缩机械臂上端与吊 装 装 置 刚 性 连
激光测 距 模 块 使 用 深 达 威 SW-LDS50B , 可
接, 连接后具备水平回转、 竖直回转、 水平伸缩三
提供 0.05~50.00m 的非接触式距离感测功能。
自由度可控运动性能。用于提供清理机器人及专
激光测距仪一般采用脉冲法和相位法 2 种方
用清理装置的可靠支点, 主要由水平回转结构、 竖
式来测量距离。该传感器采用相位法测距原理,
直回转机构、 水平伸缩机构、 自适应柔性末端、 辅
通过测量回波信号的相位并与发射信号的相位进
助牵拉结构、 环境感知单元、 综合防尘结构等部件
行比较实现测距。在户外或者条件恶劣的测量环
构成。
境下也能保证较高的测量精度。
3 安全清理机器人控制系统总体设计 PLC 、 电脑和激光测距联合调试接线图如图
5 所示。
安全清理机器人控制系统总体框架以施耐德
3.1.3 深度相机模块
M241PLC 作为主控模 块, 传 感 器 系 统 有 激 光 测
深度相机模块使用 SmartToFTC _ E2 模组,
距、 激光雷达模块和深度相机模组。运动控制系
该模组 是 基 于 飞 行 时 间 ( TimeofFli g ht , 简 称