
Page 77 - 电力与能源2022年第一期
P. 77
董飞英: 火电厂灰库安全清理机器人控制系统设计 7
1
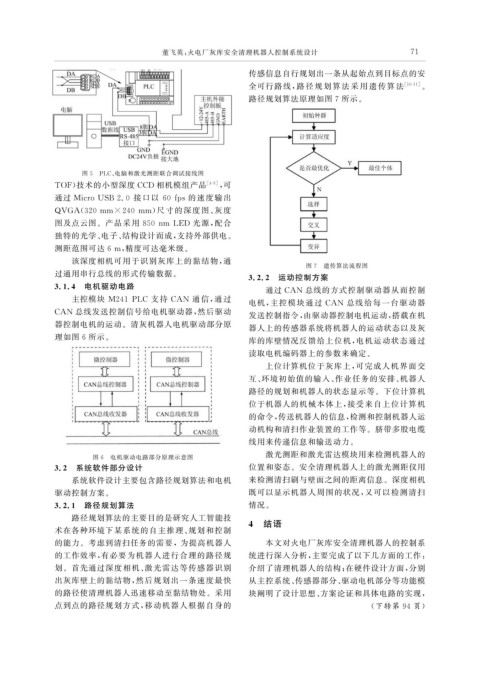
传感信息自行规划出一条从起始点到目标点的安
全可行路线, 路径 规 划 算 法 采 用 遗 传 算 法 [ 10-11 ] 。
路径规划算法原理如图 7 所示。
图 5 PLC 、 电脑和激光测距联合调试接线图
TOF ) 技术的小型深度 CCD 相机模组产品 [ 4-9 ] , 可
通过 MicroUSB2.0 接口以 60f p s的速度输出
QVGA ( 320mm×240mm ) 尺寸的深度图、 灰度
图及点云图。产品采用 850nm LED 光源, 配合
独特的光学、 电子、 结构设计而成, 支持外部供电。
测距范围可达 6m , 精度可达毫米级。
该深度相机可用于识别灰库上的黏结物, 通
图 7 遗传算法流程图
过通用串行总线的形式传输数据。 3.2.2 运动控制方案
3.1.4 电机驱动电路 通过 CAN 总线的方式控制驱动器从而控制
主控模块 M241PLC 支持 CAN 通信, 通过
电机, 主控模块通过 CAN 总线给每一台驱动器
CAN 总线发送控制信号给电机驱动器, 然后驱动 发送控制指令, 由驱动器控制电机运动, 搭载在机
器控制电机的运动。清灰机器人电机驱动部分原
器人上的传感器系统将机器人的运动状态以及灰
理如图 6 所示。
库的库壁情况反馈给上位机, 电机运动状态通过
读取电机编码器上的参数来确定。
上位计算机位于灰库上, 可完成人机界面交
互、 环境初始值的输入、 作业任务的安排、 机器人
路径的规划和机器人的状态显示等。下位计算机
位于机器人的机械本体上, 接受来自上位计算机
的命令, 传送机器人的信息, 检测和控制机器人运
动机构和清扫作业装置的工作等。脐带多股电缆
线用来传递信息和输送动力。
图 6 电机驱动电路部分原理示意图 激光测距和激光雷达模块用来检测机器人的
3.2 系统软件部分设计 位置和姿态。安全清理机器人上的激光测距仪用
系统软件设计主要包含路径规划算法和电机 来检测清扫刷与壁面之间的距离信息。深度相机
驱动控制方案。 既可以显示机器人周围的状况, 又可以检测清扫
3.2.1 路径规划算法 情况。
路径规划算法的主要目的是研究人工智能技
4 结语
术在各种环境下某系统的自主推理、 规划和控制
的能力。考虑到清扫任务的需要,为提高机器人 本文对火电厂灰库安全清理机器人的控制系
的工作效率, 有必要为机器人进行合理的路径规 统进行深入分析, 主要完成了以下几方面的工作:
划。首先通过深度相机、 激光雷达等传感器识别 介绍了清理机器人的结构; 在硬件设计方面, 分别
出灰库壁上的黏结物, 然后规划出一条速度最快 从主控系统、 传感器部分、 驱动电机部分等功能模
的路径使清理机器人迅速移动至黏结物处。采用 块阐明了设计思想、 方案论证和具体电路的实现,
点到点的路径规划方式, 移动机器人根据自身的 ( 下转第 94 页)