
Page 81 - 电力与能源2022年第三期
P. 81
高全虎: 交叉中隔壁法在电力隧道中的应用实践 2 1
7
合考虑选取合理的施工工序, 可按照实际情况选
取多种暗挖工艺, 以满足工程实际需求。此外, 建
立监控量测体系, 可以对施工过程进行全程监控,
实现“ 动态注浆”, 确保施工安全。
参考文献:
[ 1 ] 中华人 民 共 和 国 交 通 运 输 部 .公 路 隧 道 施 工 技 术 规 范:
JTGF60 — 2009 [ S ] . 北京:人民交通出版社, 2009.
[ 2 ] 中华人民共和国住房和城乡建设部 .城市轨道交通工程
监测技术规 范: GB50911 — 2013 [ S ] .北 京:中 国 建 筑 工
业出版社, 2014.
[ 3 ] 中华人民共和国住房和城乡建设部 .岩土锚杆与喷射混
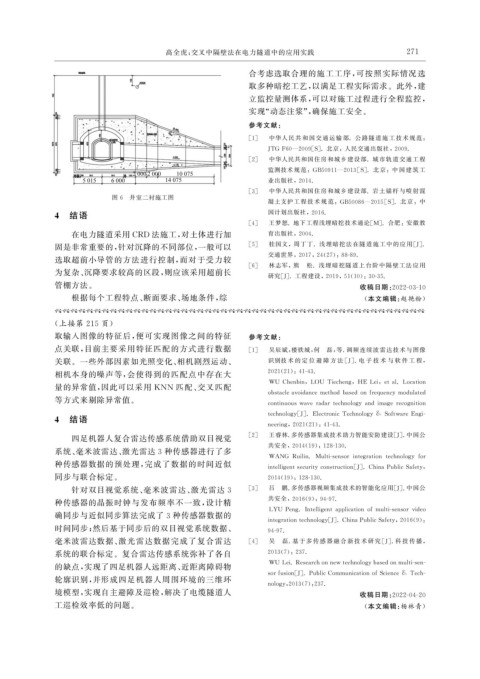
图 6 井室二衬施工图
凝土支护工 程 技 术 规 范: GB50086 — 2015 [ S ] .北 京:中
4 结语 国计划出版社, 2016.
[ 4 ] 王梦恕 . 地下工程浅埋暗挖技术通论[ M ] .合肥:安徽教
在电力隧道采用 CRD 法施工, 对土体进行加 育出版社, 2004.
固是非常重要的, 针对沉降的不同部位, 一般可以 [ 5 ] 桂国文,周丁丁 .浅埋暗挖法在隧道施工中的应用[ J ] .
交通世界, 2017 , 24 ( 27 ): 88-89.
选取超前小导管的方法进行控制, 而对于受力较
[ 6 ] 林志军,熊 松 .浅埋暗挖隧道上台阶中隔壁工法应用
为复杂、 沉降要求较高的区段, 则应该采用超前长
研究[ J ] . 工程建设, 2019 , 51 ( 10 ): 30-35.
管棚方法。 收稿日期: 2022-03-10
根据每个工程特点、 断面要求、 场地条件, 综 ( 本文编辑: 赵艳粉)
( 上接第 215 页)
取输入图像的特征后, 便可实现图像之间的特征 参考文献:
点关联, 目前主要采用特征匹配的方式进行数据 [ 1 ] 吴辰斌, 楼铁城, 何 磊, 等 . 调频连续波雷达技术与图像
关联。一些外部因素如光照变化、 相机剧烈运动、 识别技 术 的 定 位 避 障 方 法 [ J ] . 电 子 技 术 与 软 件 工 程,
相机本身的噪声等, 会使得到的匹配点中存在大 2021 ( 21 ): 41-43.
量的异常值, 因此可以采用 KNN 匹配、 交叉匹配 WU Chenbin , LOU Tiechen g , HE Lei , etal.Location
obstacleavoidancemethodbasedonfre q uenc y modulated
等方式来剔除异常值。
continuouswaveradartechnolo gyandima g ereco g nition
4 结语 technolo gy [ J ] .ElectronicTechnolo gy & SoftwareEn g i-
neerin g , 2021 ( 21 ): 41-43.
四足机器人复合雷达传感系统借助双目视觉 [ 2 ] 王睿林 . 多传感器集成技术助力智能安防建设[ J ] . 中国公
共安全, 2014 ( 19 ): 128-130.
系统、 毫米波雷达、 激光雷达 3 种传感器进行了多
WANG Ruilin.Multi-sensorinte g rationtechnolo gyfor
种传感器数据的预处理, 完成了数据的时间近似
intelli g entsecurit yconstruction [ J ] .ChinaPublicSafet y ,
同步与联合标定。 2014 ( 19 ): 128-130.
[ 3 ] 吕 鹏 . 多传感器视频集成技术的智能化应用[ J ] . 中国公
针对双目视觉系统、 毫米波雷达、 激光雷达 3
种传感器的晶振时钟与发布频率不一致, 设计精 共安全, 2016 ( 9 ): 94-97.
LYU Pen g .Intelli g enta pp licationofmulti-sensorvideo
确同步与近似同步算法完成了 3 种传感器数据的
inte g rationtechnolo gy [ J ] .ChinaPublicSafet y , 2016 ( 9 ):
时间同步; 然后基于同步后的双目视觉系统数据、
94-97.
毫米波雷达数据、 激光雷达数据完成了复合雷达 [ 4 ] 吴 磊 . 基 于 多 传 感 器 融 合 新 技 术 研 究 [ J ] . 科 技 传 播,
系统的联合标定。复合雷达传感系统弥补了各自 2013 ( 7 ): 237.
的缺点, 实现了四足机器人远距离、 近距离障碍物 WULei.Researchonnewtechnolo gybasedonmulti-sen-
sorfusion [ J ] .PublicCommunicationofScience & Tech-
轮廓识别, 并形成四足机器人周围环境的三维环
nolo gy , 2013 ( 7 ): 237.
境模型, 实现自主避障及巡检, 解决了电缆隧道人
收稿日期: 2022-04-20
工巡检效率低的问题。 ( 本文编辑: 杨林青)