
Page 45 - 电力与能源2024年第一期
P. 45
颜楠楠,等:高压电缆隧道内广域极差异常故障检测方法 39
分和垂直平滑。 Gray = 0. 299R + 0. 587G + 0. 114B (8)
通过上述过程,完成了图像预处理的去噪环 式中 Gray——灰度值;R,G,B——红、绿、蓝三
节。为了提高图像的对比度和视觉效果,同时降 个通道的像素值。
低光照变化和噪音的影响,本文首先对图像进行 式(8)是根据机器视觉对不同颜色的敏感程
彩色直方图均衡化。该方法将彩色图像转换为一 度而确定的权重系数。灰度图像可以反映图像的
种能够分离亮度和色度信息的颜色空间,然后对 亮度信息,也可以捕获图像的轮廓信息和梯度信
亮度分量进行直方图均衡化,最后再转换回原来 息。经过彩色直方图均衡化和灰度化处理后,图
的颜色空间。本文采用 YCbCr 颜色空间作为中 像的对比度和视觉效果得到了提高,同时也为后
间颜色空间,其转换公式如下: 续的特征提取和识别提供了便利。
R
ìé Y ù ú ú é ù ú ê é 0 ù ú ú 1.3 特征提取与特征匹配
ê ú
ï ï ê
ê
ê
ê
ú
ú
ï ïê êC b = A ê ú + ê ê128 ú ú
ú
êG
ï ï ê ê ú ú ê ê ú ú ê ê ú ú 本文采用 Mask RCNN 算法进行图像特征提
B
ï ïëC r û ë û ë128 û 取。Mask RCNN 在 Faster RCNN 的基础上增加
í (5)
ï ï é 0. 299 0. 587 0. 114 ù ú ú
ê
ê
ï ï A = ê ú ú 了一个掩膜分支网络,用于预测每个候选区域的
ï ï ê-0. 169 -0. 331 0. 5 ú ú
ê ê
ï ï ë 0. 5 -0. 419 -0. 081 û 二值掩码,实现目标检测和实例分割的同步进行。
î
式中 Y——亮度分量;C b,C r——色度分量;R, Mask RCNN 由两个阶段组成:第一个阶段是区域
G,B——红、绿、蓝三个通道的像素值。 建议网络(RPN),用于从输入图像中生成一系列
对于每个像素,先计算其在 YCbCr 颜色空间 的候选区域;第二个阶段是并行的分支网络,分别
下的值,然后对 Y 分量进行直方图均衡化,即将其 用于对每个候选区域进行类别分类、边界框回归
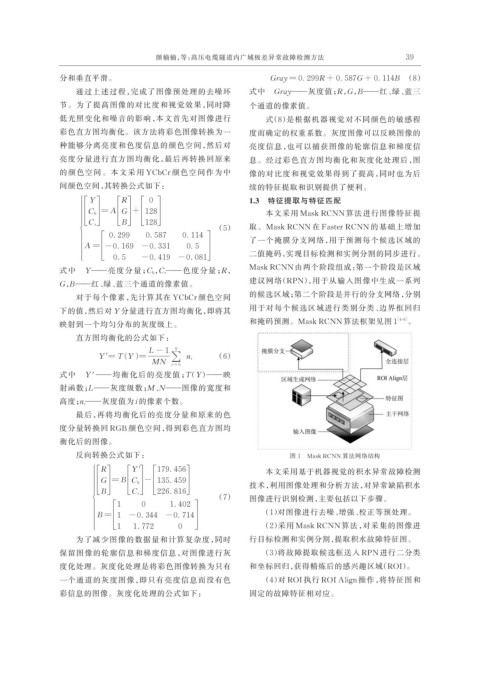
映射到一个均匀分布的灰度级上。 和掩码预测。Mask RCNN 算法框架见图 1 [4-6] 。
直方图均衡化的公式如下:
L - 1 Y
Y ′= T (Y )= ∑ n i (6)
MN
i = 0
式中 Y ′ ——均衡化后的亮度值;T(Y)——映
射函数;L——灰度级数;M、N——图像的宽度和
高度; n i——灰度值为 i的像素个数。
最后,再将均衡化后的亮度分量和原来的色
度分量转换回 RGB 颜色空间,得到彩色直方图均
衡化后的图像。
反向转换公式如下: 图 1 Mask RCNN 算法网络结构
R
ìé ù ú éY ′ ù ú ú ê é179. 456 ù ú ú 本文采用基于机器视觉的积水异常故障检测
ê
ï ï ê ú
ê
ê
ê
ú
ú
ï ïê ú = B ê êC b - ê ê135. 459 ú ú
ú
êG
ï ï ê ê ú ú ê ê ú ú ê ê ú ú 技术,利用图像处理和分析方法,对异常缺陷积水
B
ï ïë û ëC r û ë226. 816 û
í (7) 图像进行识别检测,主要包括以下步骤。
ï ï é1 0 1. 402 ù ú ú
ê
ê
ï ï B = ê ú ú (1)对图像进行去噪、增强、校正等预处理。
ï ï ê1 -0. 344 -0. 714 ú ú
ê ê
ï ï ë1 1. 772 0 û (2)采用 Mask RCNN 算法,对采集的图像进
î
为了减少图像的数据量和计算复杂度,同时 行目标检测和实例分割,提取积水故障特征图。
保留图像的轮廓信息和梯度信息,对图像进行灰 (3)将故障提取候选框送入 RPN 进行二分类
度化处理。灰度化处理是将彩色图像转换为只有 和坐标回归,获得精炼后的感兴趣区域(ROI)。
一个通道的灰度图像,即只有亮度信息而没有色 (4)对 ROI 执行 ROI Align 操作,将特征图和
彩信息的图像。灰度化处理的公式如下: 固定的故障特征相对应。