
Page 47 - 电力与能源2024年第一期
P. 47
颜楠楠,等:高压电缆隧道内广域极差异常故障检测方法 41
(2)对灰度图像 I 进行高斯滤波,得到平滑后 灰度值差异明显。阈值分割的关键在于选择合适
的图像 I s。 的阈值,常用方法包括全局阈值法、局部阈值法和
(3)对平滑后的图像 I s 进行梯度计算,得到梯 自适应阈值法等。阈值分割能够实现图像中目标
度幅值图像 G 和梯度方向图像 θ 。 和背景的分离,便于后续的特征提取和识别 [9-11] 。
(4)对梯度幅值图像 G 进行非极大值抑制,得 为了对阈值分割形态学处理后的二值化图像
到细化后的边缘图像 E。 进行连通区域分析,得到目标外接矩形框,本文采
(5)对细化后的边缘图像 E 进行双阈值分割, 用了基于扫描线的标记法。该方法首先初始化一
得到二值化后的边缘图像 B。 个标记数组和一个等价表,然后按行扫描图像中
(6)对二值化后的边缘图像 B 进行连通区域 的每个像素,根据其左邻居和上邻居的标记值,确
标记,得到不同区域的标签 L。 定其所属的连通区域,并记录不同连通区域之间
(7)对每个连通区域,计算其最大和最小灰度 的等价关系。在完成第一次扫描后,根据等价表
值,并求出其相对温差 R。 中的信息,对标记数组进行第二次扫描,将等价的
(8)根据相对温差 R 的大小,筛选出高温区 标记值统一为最小的标记值,这样就得到了图像
域,并输出其位置和大小。 中所有连通区域的唯一标记。最后,对于每个连
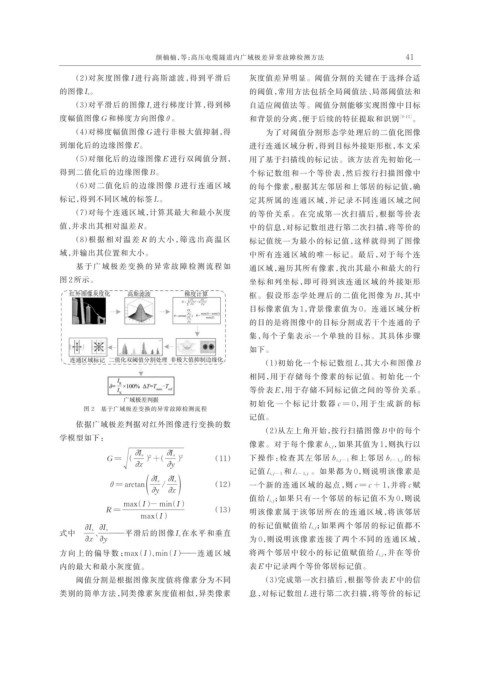
基于广域极差变换的异常故障检测流程如 通区域,遍历其所有像素,找出其最小和最大的行
图 2 所示。 坐标和列坐标,即可得到该连通区域的外接矩形
框。假设形态学处理后的二值化图像为 B,其中
目标像素值为 1,背景像素值为 0。连通区域分析
的目的是将图像中的目标分割成若干个连通的子
集,每个子集表示一个单独的目标。其具体步骤
如下。
(1)初始化一个标记数组 L,其大小和图像 B
相同,用于存储每个像素的标记值。初始化一个
等价表 E,用于存储不同标记值之间的等价关系。
初 始 化 一 个 标 记 计 数 器 c = 0,用 于 生 成 新 的 标
图 2 基于广域极差变换的异常故障检测流程
记值。
依据广域极差判据对红外图像进行变换的数
(2)从左上角开始,按行扫描图像 B 中的每个
学模型如下:
像素。对于每个像素 b i,j,如果其值为 1,则执行以
∂I s ∂I s
2
G = ( ) +( ) 2 (11) 下操作:检查其左邻居 b i,j - 1 和上邻居 b i - 1,j 的标
∂x ∂y 记值 l i,j - 1 和 l i - 1,j 。如果都为 0,则说明该像素是
( )
∂I s
∂I s
θ = arctan ∂y / ∂x (12) 一个新的连通区域的起点,则 c = c + 1,并将 c 赋
值给 l i,j;如果只有一个邻居的标记值不为 0,则说
max( I )- min ( I )
R = (13) 明该像素属于该邻居所在的连通区域,将该邻居
max( I )
的标记值赋值给 l i,j;如果两个邻居的标记值都不
∂I s ∂I s
式中 、 ——平滑后的图像 I s 在水平和垂直
∂x ∂y 为 0,则说明该像素连接了两个不同的连通区域,
方向上的偏导数; max ( I )、min ( I )——连通区域 将两个邻居中较小的标记值赋值给 l i,j,并在等价
内的最大和最小灰度值。 表 E 中记录两个等价邻居标记值。
阈值分割是根据图像灰度值将像素分为不同 (3)完成第一次扫描后,根据等价表 E 中的信
类别的简单方法,同类像素灰度值相似,异类像素 息,对标记数组 L 进行第二次扫描,将等价的标记