
Page 30 - 电力与能源2024年第二期
P. 30
170 周家玮,等:大型变电站巡检作业平台高精度移动控制装置的研制
编码器减速电机,以此可精确判断四轮的独立运
1 高精度移动控制装置实施方案
动情况,即使出现某轮打滑等极端情况,亦可进行
(1)通用的巡检作业平台控制协议,对接入的 精确控制。轮子减速轴每旋转一周,则尾部编码
外部智能设备提供清晰、简洁、有效的控制指令。 器输出 3 300 个脉冲。将脉冲信号接入控制器,通
(2)研究一种基于多传感器的巡检作业平台 过读取已产生的脉冲数,可以判断该电机产生的
高精度移动控制策略及方法。 位移;通过读取单位时间内产生的脉冲数,则可以
(3)设计并开发一套巡检作业平台高精度移 计算该电机的转速。
动控制装置,实现对上级指令的转化,以及对巡检 (2)九轴传感器。该模块采用的核心芯片为
作业平台的高精度控制。 MPU9250,其内部集成陀螺仪、加速度计和磁力
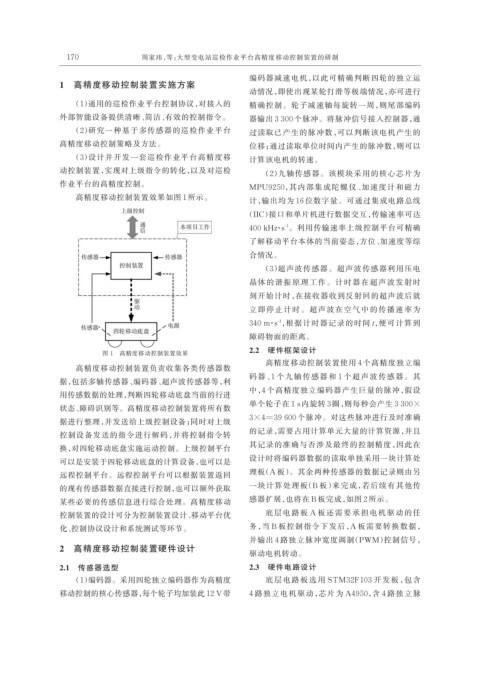
高精度移动控制装置效果如图 1 所示。 计,输出均为 16 位数字量。可通过集成电路总线
(IIC)接口和单片机进行数据交互,传输速率可达
400 kHz·s 。利用传输速率上级控制平台可精确
-1
了解移动平台本体的当前姿态,方位、加速度等综
合情况。
(3)超声波传感器。超声波传感器利用压电
晶体的谐振原理工作。计时器在超声波发射时
刻开始计时,在接收器收到反射回的超声波后就
立即停止计时。超声波在空气中的传播速率为
340 m·s ,根据计时器记录的时间 t,便可计算到
-1
障碍物面的距离。
2.2 硬件框架设计
图 1 高精度移动控制装置效果
高精度移动控制装置使用 4 个高精度独立编
高精度移动控制装置负责收集各类传感器数
码器、1 个九轴传感器和 1 个超声波传感器。其
据,包括多轴传感器、编码器、超声波传感器等,利
中,4 个高精度独立编码器产生巨量的脉冲,假设
用传感数据的处理,判断四轮移动底盘当前的行进
单个轮子在 1 s 内旋转 3 圈,则每秒会产生 3 300×
状态、障碍识别等。高精度移动控制装置将所有数
3×4=39 600 个脉冲。对这些脉冲进行及时准确
据进行整理,并发送给上级控制设备;同时对上级
的记录,需要占用计算单元大量的计算资源,并且
控制设备发送的指令进行解码,并将控制指令转
其记录的准确与否涉及最终的控制精度,因此在
换,对四轮移动底盘实施运动控制。上级控制平台
可以是安装于四轮移动底盘的计算设备,也可以是 设计时将编码器数据的读取单独采用一块计算处
远程控制平台。远程控制平台可以根据装置返回 理板(A 板)。其余两种传感器的数据记录则由另
的现有传感器数据直接进行控制,也可以额外获取 一块计算处理板(B 板)来完成,若后续有其他传
某些必要的传感信息进行综合处理。高精度移动 感器扩展,也将在 B 板完成,如图 2 所示。
控制装置的设计可分为控制装置设计、移动平台优 底层电路板 A 板还需要承担电机驱动的任
化、控制协议设计和系统测试等环节。 务,当 B 板控制指令下发后,A 板需要转换数据,
并输出 4 路独立脉冲宽度调制(PWM)控制信号,
2 高精度移动控制装置硬件设计
驱动电机转动。
2.1 传感器选型 2.3 硬件电路设计
(1)编码器。采用四轮独立编码器作为高精度 底层电路板选用 STM32F103 开发板,包含
移动控制的核心传感器,每个轮子均加装此 12 V 带 4 路独立电机驱动,芯片为 A4950,含 4 路独立脉