
Page 32 - 电力与能源2024年第二期
P. 32
172 周家玮,等:大型变电站巡检作业平台高精度移动控制装置的研制
过程中突发掉电,则发出底盘停止运动指令,避免 C 三点处于一条直线,AB 距离 100 cm,AC 距离
失控,这个安全时间设置为 0.5 s;另一路定时器则 150 cm,CD 距 离 150 cm,AC 与 CD 相 垂 直 ,AD
主要用于读取在规定时间内捕捉到的脉冲数;串 与 AC 夹角为 45°。
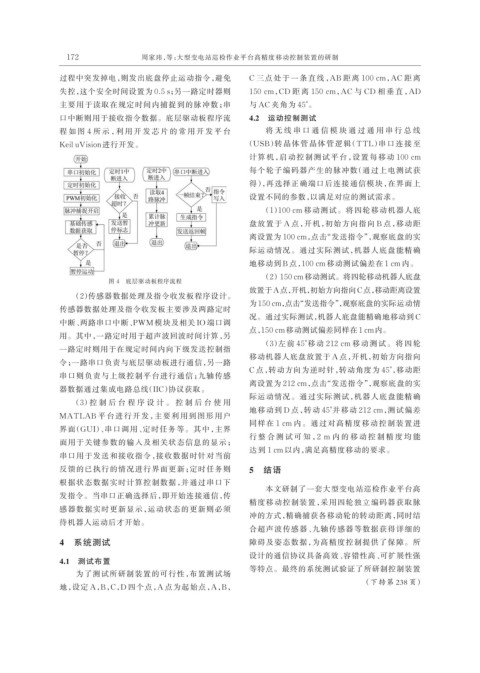
口中断则用于接收指令数据。底层驱动板程序流 4.2 运动控制测试
程 如 图 4 所 示 ,利 用 开 发 芯 片 的 常 用 开 发 平 台 将 无 线 串 口 通 信 模 块 通 过 通 用 串 行 总 线
Keil uVision 进行开发。 (USB)转晶体管晶体管逻辑(TTL)串口连接至
计算机,启动控制测试平台,设置每移动 100 cm
每个轮子编码器产生的脉冲数(通过上电测试获
得),再选择正确端口后连接通信模块,在界面上
设置不同的参数,以满足对应的测试需求。
(1)100 cm 移动测试。将四轮移动机器人底
盘放置于 A 点,开机,初始方向指向 B 点,移动距
离设置为 100 cm,点击“发送指令”,观察底盘的实
际运动情况。通过实际测试,机器人底盘能精确
地移动到 B 点,100 cm 移动测试偏差在 1 cm 内。
(2)150 cm移动测试。将四轮移动机器人底盘
图 4 底层驱动板程序流程
放置于A点,开机,初始方向指向C点,移动距离设置
(2)传感器数据处理及指令收发板程序设计。
为 150 cm,点击“发送指令”,观察底盘的实际运动情
传感器数据处理及指令收发板主要涉及两路定时
况。通过实际测试,机器人底盘能精确地移动到 C
中断、两路串口中断、PWM 模块及相关 IO 端口调
点,150 cm 移动测试偏差同样在 1 cm内。
用。其中,一路定时用于超声波回波时间计算,另
(3)左前 45°移动 212 cm 移动测试。将四轮
一路定时则用于在规定时间内向下级发送控制指
移动机器人底盘放置于 A 点,开机,初始方向指向
令;一路串口负责与底层驱动板进行通信,另一路
C 点,转动方向为逆时针,转动角度为 45°,移动距
串口则负责与上级控制平台进行通信;九轴传感
离设置为 212 cm,点击“发送指令”,观察底盘的实
器数据通过集成电路总线(IIC)协议获取。
际运动情况。通过实际测试,机器人底盘能精确
(3)控 制 后 台 程 序 设 计 。 控 制 后 台 使 用
地移动到 D 点,转动 45°并移动 212 cm,测试偏差
MATLAB 平台进行开发,主要利用到图形用户
同样在 1 cm 内。通过对高精度移动控制装置进
界面(GUI)、串口调用、定时任务等。其中,主界
行 整 合 测 试 可 知 ,2 m 内 的 移 动 控 制 精 度 均 能
面用于关键参数的输入及相关状态信息的显示;
达到 1 cm 以内,满足高精度移动的要求。
串口用于发送和接收指令,接收数据时针对当前
反馈的已执行的情况进行界面更新;定时任务则 5 结语
根据状态数据实时计算控制数据,并通过串口下
本文研制了一套大型变电站巡检作业平台高
发指令。当串口正确选择后,即开始连接通信,传
精度移动控制装置,采用四轮独立编码器获取脉
感器数据实时更新显示,运动状态的更新则必须
冲的方式,精确捕获各移动轮的转动距离,同时结
待机器人运动后才开始。
合超声波传感器、九轴传感器等数据获得详细的
4 系统测试 障碍及姿态数据,为高精度控制提供了保障。所
设计的通信协议具备高效、容错性高、可扩展性强
4.1 测试布置
等特点。最终的系统测试验证了所研制控制装置
为了测试所研制装置的可行性,布置测试场
(下转第 238 页)
地,设定 A,B,C,D 四个点,A 点为起始点,A,B,