
Page 125 - 电力与能源2024年第四期
P. 125
王 健,等:配电网带电作业机器人的功能与应用 519
第三代:全自主机器人作业。这一阶段的机
器人在前两代机器人的基础上融合了现代先进设
备与技术,具有高智能化、高自主性、多功能性、可
编程、拟人化等众多优点。在减少作业风险和工
作成本的同时,其工作效率和作业质量也得到了
大幅提升。
2 组成与功能
上海地区的配电网带电作业机器人采用基于
绝缘杆的作业方式,它通过运用机械臂前端的绝 图 2 机器人模块
缘杆作为操作主绝缘,将绝缘斗和绝缘臂作为辅 终端操作模块为人机交互界面,对机器人的
助绝缘,具有较高的绝缘水平。同时,鉴于其绝缘 操作指令由该模块输出。机器人通过终端操作模
短杆法的作业方式,有效避免了绝缘遮蔽工序,保 块下达指令,包括环境自检、作业参数确定、停车
障了安全距离的同时也提高了作业效率。 点标定、位姿建模、单相建模、引线搭接、撤离电杆
机器人系统构成如图 1 所示,该配电网带电 等指令。
机器人由控制系统、机械系统、通信系统、绝缘系 通信模块可以定位机器人所处的位置。以此
统 、虚 拟 图 像 系 统 以 及 人 机 交 互 系 统 6 大 系 统
为原点便于后续作业的场景建模。
组成。
末端工具模块通过变换不同的操作工具,实
现作业类别的多样性,满足不同场景的应用需求。
该机器人可开展视觉识别、环境建模、路径规
划、导线剥皮、氧化层清除、引线抓取、夹线安装和
金具紧固等全套 10 kV 带电搭接引线作业。其中
大部分的流程为自主作业,作业人员仅需在地面
进行操作信息确认和校验即可,这大大降低了带
电作业人员的劳动强度,同时有效确保了作业人
员的人身安全。
相较于早期作业机器人,该机器人具有以下
几点技术优势。
图 1 机器人系统构成
(1)较高的安全性。安全性作为配电网带电
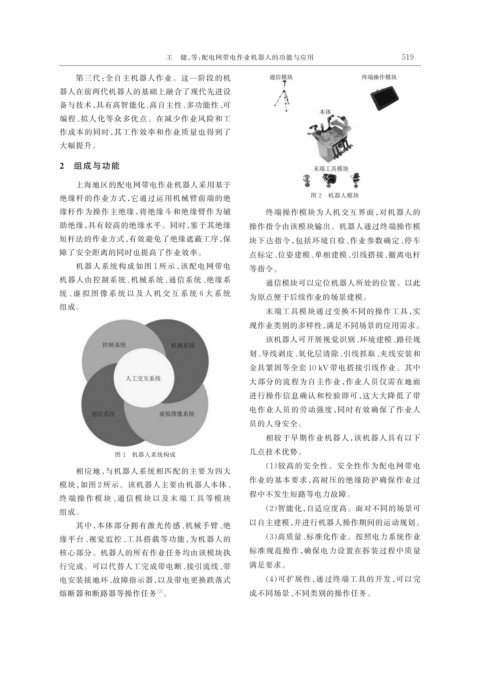
相应地,与机器人系统相匹配的主要为四大
作业的基本要求,高耐压的绝缘防护确保作业过
模块,如图 2 所示。该机器人主要由机器人本体、
程中不发生短路等电力故障。
终 端 操 作 模 块 、通 信 模 块 以 及 末 端 工 具 等 模 块
组成。 (2)智能化,自适应度高。面对不同的场景可
其中,本体部分拥有激光传感、机械手臂、绝 以自主建模,并进行机器人操作期间的运动规划。
缘平台、视觉监控、工具搭载等功能,为机器人的 (3)高质量、标准化作业。按照电力系统作业
核心部分。机器人的所有作业任务均由该模块执 标准规范操作,确保电力设置在拆装过程中质量
行完成。可以代替人工完成带电断、接引流线、带 满足要求。
电安装接地环、故障指示器,以及带电更换跌落式 (4)可扩展性,通过终端工具的开发,可以完
[3]
熔断器和断路器等操作任务 。 成不同场景、不同类别的操作任务。