
Page 126 - 电力与能源2024年第四期
P. 126
520 王 健,等:配电网带电作业机器人的功能与应用
时,需确保两台机器人车辆的停放布局合理,均可
3 场景应用与分析
以覆盖各自方向的作业任务,且工作区域不得重
3.1 机器人简单项目作业 叠。作业时,两侧机器人分别逐相搭接,同步完成
如图 3 所示,配电网带电作业机器人正在进 作业。
行绝缘接地环的安装作业。此类作业属于简单的 上述不同场景下带电作业机器人的作业方式
带电作业项目,可通过单台机器人独立完成。在 和注意事项有所不同。因此,在作业前需要对作
作业过程中机,器人独在搭载绝缘斗臂车进行现 业环境进行勘察,包括地形平整度、工作区域是否
场定位、工作区域调整、主线绝缘层清理、接地环 开阔、环境激光建模有无遮挡等因素。在使用工
附件夹取安装等一系列操作,实现快速高效的作 具时,需匹配相应的夹持工具以及耗材附件。同
业完成。 时,作业操作时需标准化操作,否则易伤及电力
设施。
4 结语
现代电力线路环境十分复杂,线路设备繁多,
且人工成本也在逐步递增,各省区市电力公司都
在加强带电作业承载力,带电作业机器人的出现,
有效地解决了带电作业人员不足、承载力有限的
问题。
当前人工智能技术飞速发展。机器学习、柔
性机械臂、虚拟现实增强等新技术使得带电作业
图 3 配电网带电作业机器人安装绝缘接地环
机器人在感知、控制、执行等方面更加智能化。未
3.2 机器人复杂项目作业
来,在实际带电作业场景下,实时性强、持重大、精
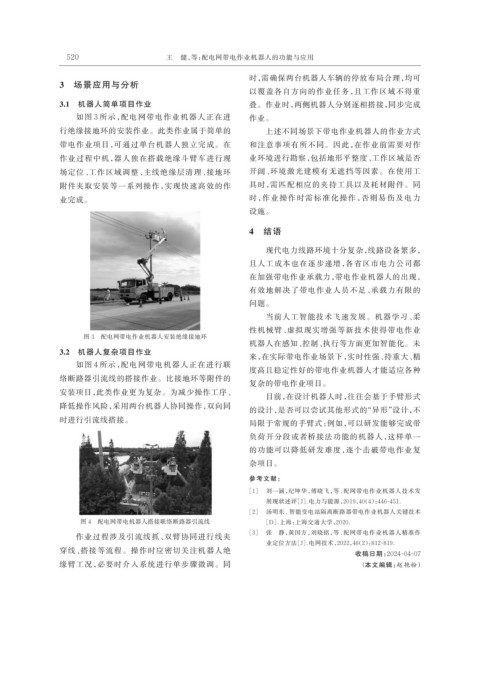
如图 4 所示,配电网带电机器人正在进行联
度高且稳定性好的带电作业机器人才能适应各种
络断路器引流线的搭接作业。比接地环等附件的
复杂的带电作业项目。
安装项目,此类作业更为复杂。为减少操作工序、
目前,在设计机器人时,往往会基于手臂形式
降低操作风险,采用两台机器人协同操作,双向同
的设计,是否可以尝试其他形式的“异形”设计,不
时进行引流线搭接。
局限于常规的手臂式:例如,可以研发能够完成带
负荷开分段或者桥接法功能的机器人,这样单一
的功能可以降低研发难度,逐个击破带电作业复
杂项目。
参考文献:
[1] 刘一涵,纪坤华,傅晓飞,等 . 配网带电作业机器人技术发
.
展现状述评[J] 电力与能源,2019,40(4):446-451.
[2] 汤明东 . 智能变电站隔离断路器带电作业机器人关键技术
图 4 配电网带电机器人搭接联络断路器引流线 [D] 上海:上海交通大学,2020.
.
[3] 张 静,黄国方,刘晓铭,等 . 配网带电作业机器人精准作
作业过程涉及引流线抓、双臂协同进行线夹
业定位方法[J] 电网技术,2022,46(2):812-819.
.
穿线、搭接等流程。操作时应密切关注机器人绝
收稿日期:2024-04-07
缘臂工况,必要时介入系统进行单步骤微调。同 (本文编辑:赵艳粉)