
Page 29 - 电力与能源2024年第五期
P. 29
姚 兵,等:基于卡尔曼滤波的新型电力系统电气参数估算方法研究 561
出信号。 T ( k = 0 )
ï ï
ìν 0 ν 0
ï ï
卡尔曼滤波器利用上一个时刻的信息来估测 ν n = í ρν n - 1 + ν n ν n T (21)
ï ï ( k ≥ 1 )
î
当前时刻的信息,并根据当前时刻的观测值修正 ï ï 1 + ρ
估测的状态,从而实现当前时刻的最优估测。因 式 中 ρ—— 遗 忘 因 子 ,通 常 为 常 数 ,一 般 可 取
此,卡尔曼滤波器可分为两个部分,分别是状态更 值 0.95。
新和数据估测。其中,状态更新可表示为式(11) 2.2.2 Q 矩阵修正
~式(12),数据估测可表示为式(13)~式(15)。 通过改进的卡尔曼滤波器,矩阵 Q 中的元素
̂ 可修正为
X ( n| n - 1 )= FX ( n - 1 ) (11)
P ( n| n - 1 )= FP ( n - 1 ) F + Q (12) q ( n|n ) = λ 2,n q ( n|n - 1 ) + q ( n - 1|n - 1 ) (22)
T
1 m = 5 2
-1 ]
T
T
K ( n )= P ( n| n- 1 ) H ( R+ HP ( n| n- 1 ) H ) q ( n|n - 1 ) = m ∑[ R 1 ( n - i )- R 1 ( n - 1 - i )
i = 1
(13)
(23)
̂
X ( n )= X ( n|n - 1 )+ K ( n ) [ y ( n )- 式中 λ 2,n——矩阵 Q 的渐消因子,为常数,通常
̂
HX ( n|n - 1 ) ] (14) 取值 0.95。
P ( n )=[ I - K ( n ) H ] P ( n|n - 1 ) (15) 通过引入渐消因子可实时调整矩阵 P 和 Q,
̂
式中 X ( n| n - 1 )——状态变量矩阵 X 的当前时 不需要根据经验值设置卡尔曼滤波器中的参数。
刻预测值; P ( n| n - 1 )——当前时刻预测值的先 这样,改进的卡尔曼滤波器能够实现快速跟踪突
验估计协方差矩阵; Q——过程噪声的方差矩阵; 变的三相电气信号,实现对电气信号的准确估计。
K ( n )——卡尔曼滤波器增益。 采用改进的卡尔曼滤波器进行三相电气信号
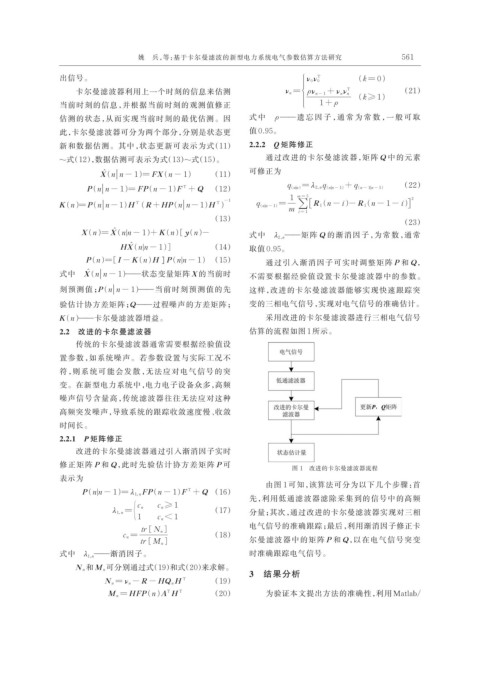
2.2 改进的卡尔曼滤波器 估算的流程如图 1 所示。
传统的卡尔曼滤波器通常需要根据经验值设
置参数,如系统噪声。若参数设置与实际工况不
符,则系统可能会发散,无法应对电气信号的突
变。在新型电力系统中,电力电子设备众多,高频
噪声信号含量高,传统滤波器往往无法应对这种
高频突发噪声,导致系统的跟踪收敛速度慢、收敛
时间长。
2.2.1 P 矩阵修正
改进的卡尔曼滤波器通过引入渐消因子实时
修正矩阵 P 和 Q,此时先验估计协方差矩阵 P 可 图 1 改进的卡尔曼滤波器流程
表示为
由图 1 可知,该算法可分为以下几个步骤:首
P ( n|n - 1 )= λ 1,n FP ( n - 1 ) F + Q (16) 先,利用低通滤波器滤除采集到的信号中的高频
T
{ c n c n ≥ 1
λ 1,n = (17) 分量;其次,通过改进的卡尔曼滤波器实现对三相
1 c n < 1
电气信号的准确跟踪;最后,利用渐消因子修正卡
tr [ N n ]
c n = (18)
tr [ M n ] 尔曼滤波器中的矩阵 P 和 Q,以在电气信号突变
式中 λ 1,n——渐消因子。 时准确跟踪电气信号。
N n 和 M n 可分别通过式(19)和式(20)来求解。
3 结果分析
N n = ν n - R - HQ n H T (19)
M n = HFP ( n ) A H T (20) 为验证本文提出方法的准确性,利用 Matlab/
T