
Page 71 - 电力与能源2024年第五期
P. 71
朱正一,等:500 kV 换流站轨道式巡检机器人系统设计 603
射吸收光谱法等。利用红外技术进行的非接触式 分支是一个卷积网络,取 ROI 分类器选择的正区
测温因具有以下特点,目前被广泛用于电力系统。 域为输入,并生成它们的掩码。其生成的掩码分
(1)非接触。红外测温是利用被测物体辐射 辨率较低,为 28×28 像素,但它们是由浮点数表
的红外能量进行测温的,不需要直接接触被测物 示的软掩码,因此相对于二进制掩码具有更多的
体,因此不会破坏被测物体的温度场分布,而且还 细节。掩码的小尺寸属性有助于保持掩码分支网
可对人员难以接触到的物体进行测量,一方面可 络的轻量性。在训练过程中,将真实的掩码缩小
以提高工作效率,另一方面可以降低特殊场景下 为 28×28 来计算损失函数,在推断过程中,将预
的人员作业风险。 测的掩码放大为 ROI 边框的尺寸以给出最终的掩
(2)反应速度快。红外测温对温度的反应非 码结果,每个目标都有一个掩码,这可以有效避免
常灵敏,可以快速地测量物体的温度,相较接触式 不同类之间的竞争。
测温需要与被测物体达到热平衡后才能反应真实 通过 MASK-RCNN 网络最终获取到设备的
温度而言,非接触式测温可以快速高效地检测物 位置,并判别出设备的类型。采用对比匹配方法
体的温度变化。 进行处理,即在建立全面的电气设备图像数据库
(3)测温范围宽。红外测温的测温范围可以 后,将检测的图像与需要诊断的电气设备图片进
从零下几十摄氏度到零上几千摄氏度,对高电压 行对比和匹配,系统将会自动识别对应设备类型
及特高电压场景可能产生的极限温度更为适用。 区域内的平均温度和最高温度。
(4)适用于微小目标。相较传统的接触式测
5 现场运行
温,红外测温可以有效监测一些微小目标的温度
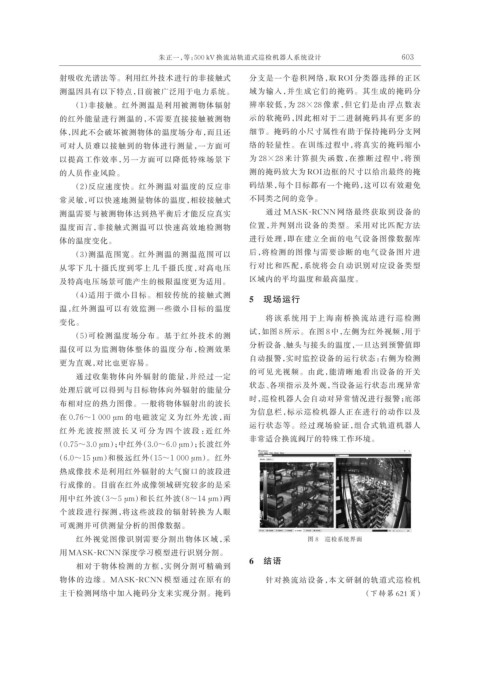
将该系统用于上海南桥换流站进行巡检测
变化。
试,如图 8 所示。在图 8 中,左侧为红外视频,用于
(5)可检测温度场分布。基于红外技术的测
分析设备、触头与接头的温度,一旦达到预警值即
温仪可以为监测物体整体的温度分布,检测效果
自动报警,实时监控设备的运行状态:右侧为检测
更为直观,对比也更容易。
的可见光视频。由此,能清晰地看出设备的开关
通过收集物体向外辐射的能量,并经过一定
状态、各项指示及外观,当设备运行状态出现异常
处理后就可以得到与目标物体向外辐射的能量分
时,巡检机器人会自动对异常情况进行报警;底部
布相对应的热力图像。一般将物体辐射出的波长
为信息栏,标示巡检机器人正在进行的动作以及
在 0.76~1 000 μm 的电磁波定义为红外光波,而
运行状态等。经过现场验证,组合式轨道机器人
红 外 光 波 按 照 波 长 又 可 分 为 四 个 波 段 :近 红 外
非常适合换流阀厅的特殊工作环境。
(0.75~3.0 μm);中红外(3.0~6.0 μm);长波红外
(6.0~15 μm)和极远红外(15~1 000 μm)。红外
热成像技术是利用红外辐射的大气窗口的波段进
行成像的。目前在红外成像领域研究较多的是采
用中红外波(3~5 μm)和长红外波(8~14 μm)两
个波段进行探测,将这些波段的辐射转换为人眼
可观测并可供测量分析的图像数据。
红外视觉图像识别需要分割出物体区域,采 图 8 巡检系统界面
用 MASK-RCNN 深度学习模型进行识别分割。
6 结语
相对于物体检测的方框,实例分割可精确到
物体的边缘。MASK-RCNN 模型通过在原有的 针对换流站设备,本文研制的轨道式巡检机
主干检测网络中加入掩码分支来实现分割。掩码 (下转第 621 页)