
Page 68 - 电力与能源2024年第五期
P. 68
600 朱正一,等:500 kV 换流站轨道式巡检机器人系统设计
息化处理。由于站内固定式视频摄像头无法观察
到各层内部器件与装置的工作状态,因此无法形
[6]
成相应的数字化资产 。
(3)红外成像技术应用缺失。目前站内视频
摄像头不具备红外成像功能,无法提供设备热状
态监测信息,而阀塔各层内部器件与装置的温度
变化及趋势直接关系到设备运行稳定和日常运维
工作的针对性及效率。红外热像测温技术是一种
十分有效的新型设备故障检测和温度在线测量技
术,能够准确判断电力系统电气设备的运行情况,
提高设备管理运行水平,同时在输电线路预防性
维护和检测方面也具有显著优势 。
[7]
(4)数字化与智能化运维手段缺乏。目前站
内没有基于可视与红外组合的集信息采集、处理、
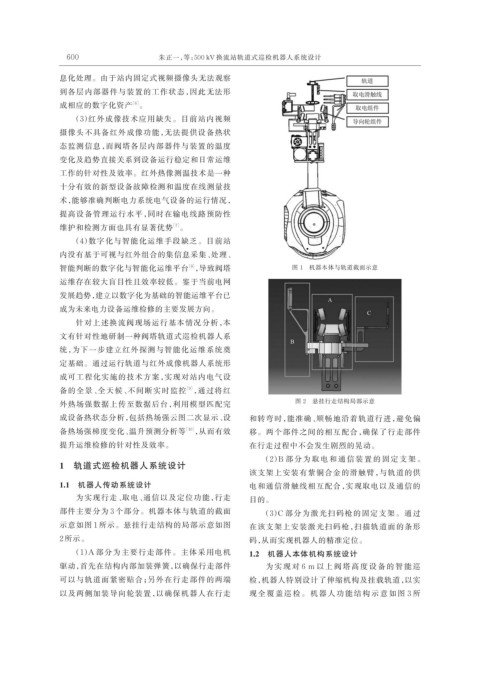
智能判断的数字化与智能化运维平台 ,导致阀塔 图 1 机器本体与轨道截面示意
[8]
运维存在较大盲目性且效率较低。鉴于当前电网
发展趋势,建立以数字化为基础的智能运维平台已
成为未来电力设备运维检修的主要发展方向。
针对上述换流阀现场运行基本情况分析,本
文有针对性地研制一种阀塔轨道式巡检机器人系
统,为下一步建立红外探测与智能化运维系统奠
定基础。通过运行轨道与红外成像机器人系统形
成可工程化实施的技术方案,实现对站内电气设
备的全景、全天候、不间断实时监控 ,通过将红
[9]
外热场强数据上传至数据后台,利用模型匹配完 图 2 悬挂行走结构局部示意
成设备热状态分析,包括热场强云图二次显示、设 和转弯时,能准确、顺畅地沿着轨道行进,避免偏
备热场强梯度变化、温升预测分析等 [10] ,从而有效 移。两个部件之间的相互配合,确保了行走部件
提升运维检修的针对性及效率。 在行走过程中不会发生剧烈的晃动。
(2)B 部 分 为 取 电 和 通 信 装 置 的 固 定 支 架 。
1 轨道式巡检机器人系统设计
该支架上安装有紫铜合金的滑触臂,与轨道的供
1.1 机器人传动系统设计 电和通信滑触线相互配合,实现取电以及通信的
为实现行走、取电、通信以及定位功能,行走 目的。
部件主要分为 3 个部分。机器本体与轨道的截面 (3)C 部分为激光扫码枪的固定支架。通过
示意如图 1 所示。悬挂行走结构的局部示意如图 在该支架上安装激光扫码枪,扫描轨道面的条形
2 所示。 码,从而实现机器人的精准定位。
(1)A 部分为主要行走部件。主体采用电机 1.2 机器人本体机构系统设计
驱动,首先在结构内部加装弹簧,以确保行走部件 为 实 现 对 6 m 以 上 阀 塔 高 度 设 备 的 智 能 巡
可以与轨道面紧密贴合;另外在行走部件的两端 检,机器人特别设计了伸缩机构及挂载轨道,以实
以及两侧加装导向轮装置,以确保机器人在行走 现全覆盖巡检。机器人功能结构示意如图 3 所