
Page 69 - 电力与能源2024年第五期
P. 69
朱正一,等:500 kV 换流站轨道式巡检机器人系统设计 601
示。升降机构能够驱动机器人球舱在 2 m 范围内 码,实现精准定位。
进行上下移动,而机器人球舱本身则具备 360° 旋
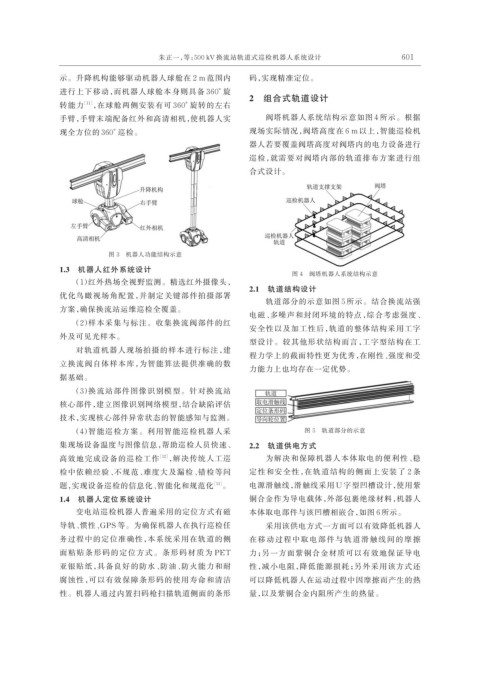
2 组合式轨道设计
转能力 [11] ,在球舱两侧安装有可 360° 旋转的左右
手臂,手臂末端配备红外和高清相机,使机器人实 阀塔机器人系统结构示意如图 4 所示。根据
现全方位的 360° 巡检。 现场实际情况,阀塔高度在 6 m 以上,智能巡检机
器人若要覆盖阀塔高度对阀塔内的电力设备进行
巡检,就需要对阀塔内部的轨道排布方案进行组
合式设计。
图 3 机器人功能结构示意
1.3 机器人红外系统设计
图 4 阀塔机器人系统结构示意
(1)红外热场全视野监测。精选红外摄像头,
2.1 轨道结构设计
优化鸟瞰视场角配置,并制定关键部件拍摄部署
轨道部分的示意如图 5 所示。结合换流站强
方案,确保换流站运维巡检全覆盖。
电磁、多噪声和封闭环境的特点,综合考虑强度、
(2)样本采集与标注。收集换流阀部件的红
安全性以及加工性后,轨道的整体结构采用工字
外及可见光样本。
型设计。较其他形状结构而言,工字型结构在工
对轨道机器人现场拍摄的样本进行标注,建
程力学上的截面特性更为优秀,在刚性、强度和受
立换流阀自体样本库,为智能算法提供准确的数
力能力上也均存在一定优势。
据基础。
(3)换流站部件图像识别模型。针对换流站
核心部件,建立图像识别网络模型,结合缺陷评估
技术,实现核心部件异常状态的智能感知与监测。
(4)智能巡检方案。利用智能巡检机器人采 图 5 轨道部分的示意
集现场设备温度与图像信息,帮助巡检人员快速、 2.2 轨道供电方式
高效地完成设备的巡检工作 [12] ,解决传统人工巡 为解决和保障机器人本体取电的便利性、稳
检中依赖经验、不规范、难度大及漏检、错检等问 定性和安全性,在轨道结构的侧面上安装了 2 条
题,实现设备巡检的信息化、智能化和规范化 [13] 。 电源滑触线,滑触线采用 U 字型凹槽设计,使用紫
1.4 机器人定位系统设计 铜合金作为导电载体,外部包裹绝缘材料,机器人
变电站巡检机器人普遍采用的定位方式有磁 本体取电部件与该凹槽相嵌合,如图 6 所示。
导轨、惯性、GPS 等。为确保机器人在执行巡检任 采用该供电方式一方面可以有效降低机器人
务过程中的定位准确性,本系统采用在轨道的侧 在移动过程中取电部件与轨道滑触线间的摩擦
面粘贴条形码的定位方式。条形码材质为 PET 力;另一方面紫铜合金材质可以有效地保证导电
亚银贴纸,具备良好的防水、防油、防火能力和耐 性,减小电阻,降低能源损耗;另外采用该方式还
腐蚀性,可以有效保障条形码的使用寿命和清洁 可以降低机器人在运动过程中因摩擦而产生的热
性。机器人通过内置扫码枪扫描轨道侧面的条形 量,以及紫铜合金内阻所产生的热量。