
Page 70 - 电力与能源2024年第五期
P. 70
602 朱正一,等:500 kV 换流站轨道式巡检机器人系统设计
神经网络研发出的一种识别手段,其主要工作原
理是使用两阶段目标检测框架。其中,第一阶段
利用深度网络提取图像特征,在特征图上逐点生
成不同尺寸长宽比的锚框(Anchor),并筛选感兴
趣区域(ROI)。第二阶段对 ROI 进行分类和边框
回归,得到最终的目标区域及类别。
识别流程具体如下。
图 6 机器人取电示意图
(1)利用主干卷积神经网络(ResNet)作为特
2.3 通信方式设计
征提取器,同时捕捉底层(边缘,角)与高层特征。
基于组合式轨道,本系统采用低压电力线载
(2)通过特征金字塔网络(FPN)对主干网络
波通信方式。为解决和保障机器人与前端服务器
进行扩展,以便在多个尺度上更好地表征目标。
通信的便利性和稳定性,在轨道的侧面安装了一
(3)通过区域提取网络(RPN)为每个特征点
条载波滑触线,该滑触线的整体结构及原理与电
生成 Anchor,并输出 Anchor 类别(前景/背景)与
源滑触线相同。
边框精调。
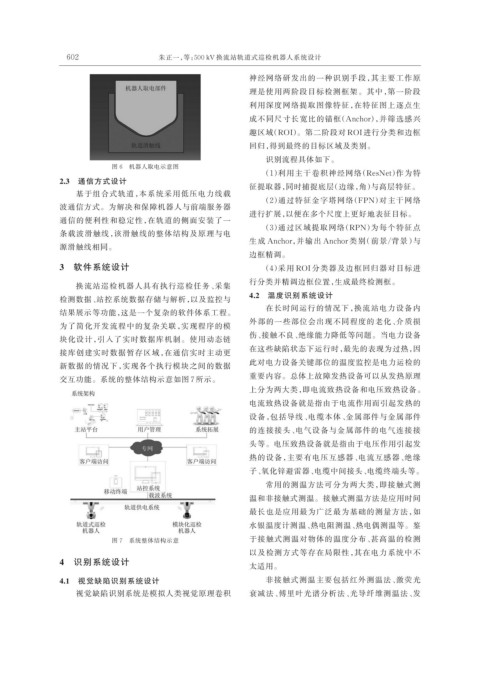
3 软件系统设计 (4)采用 ROI 分类器及边框回归器对目标进
行分类并精调边框位置,生成最终检测框。
换流站巡检机器人具有执行巡检任务、采集
4.2 温度识别系统设计
检测数据、站控系统数据存储与解析,以及监控与
在长时间运行的情况下,换流站电力设备内
结果展示等功能,这是一个复杂的软件体系工程。
外部的一些部位会出现不同程度的老化、介质损
为了简化开发流程中的复杂关联,实现程序的模
伤、接触不良、绝缘能力降低等问题。当电力设备
块化设计,引入了实时数据库机制。使用动态链
在这些缺陷状态下运行时,最先的表现为过热,因
接库创建实时数据暂存区域,在通信实时主动更
此对电力设备关键部位的温度监控是电力运检的
新数据的情况下,实现各个执行模块之间的数据
交互功能。系统的整体结构示意如图 7 所示。 重要内容。总体上故障发热设备可以从发热原理
上分为两大类,即电流致热设备和电压致热设备。
电流致热设备就是指由于电流作用而引起发热的
设备,包括导线、电缆本体、金属部件与金属部件
的连接接头、电气设备与金属部件的电气连接接
头等。电压致热设备就是指由于电压作用引起发
热的设备,主要有电压互感器、电流互感器、绝缘
子、氧化锌避雷器、电缆中间接头、电缆终端头等。
常用的测温方法可分为两大类,即接触式测
温和非接触式测温。接触式测温方法是应用时间
最长也是应用最为广泛最为基础的测量方法,如
水银温度计测温、热电阻测温、热电偶测温等。鉴
图 7 系统整体结构示意 于接触式测温对物体的温度分布、甚高温的检测
以及检测方式等存在局限性,其在电力系统中不
4 识别系统设计
太适用。
4.1 视觉缺陷识别系统设计 非接触式测温主要包括红外测温法、激荧光
视觉缺陷识别系统是模拟人类视觉原理卷积 衰减法、傅里叶光谱分析法、光导纤维测温法、发