
Page 42 - 电力与能源2022年第五期
P. 42
4 0 4 何嘉玮, 等: 基于惯性导航的电缆管道测绘装置及其测试误差分析
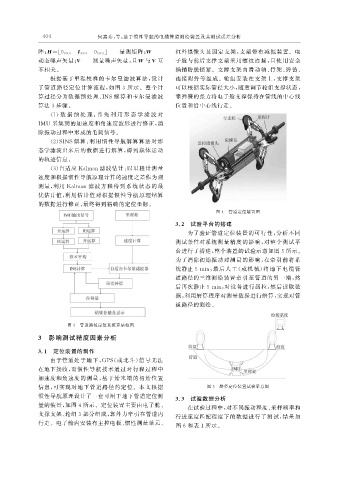
]———量测矩阵; W ——— 红外摄像头及固定支架, 支架带有减振装置。电
阵; H= [ 0 3×3 I 3×3 0 3×3
动态噪声矢量; V ———测量噪声矢量, 且W 与V 互 子舱与前后支撑支架采用螺纹连接, 且使用安全
不相关。 插销防脱锁紧。支撑支架由滑动轴、 骨架、 弹簧、
根据基于里程校准的卡尔曼滤波算法, 设计 连接附件等组成。轮组安装在支架上, 支撑支架
了管道路径定位计算流程, 如图 3 所示。整个计 可以根据实际管径大小, 随意调节轮组支撑状态,
算过程分为数据预处理、 INS 解算和卡尔曼滤波 靠弹簧的张力将电子舱支撑保持在管线的中心线
算法 3 步骤。 位置和沿中心线行走。
( 1 ) 数 据 预 处 理: 首 先 利 用 形 态 学 滤 波 对
IMU 采集到的加速度和角速度波形进行修正, 消
除振动过程中形成的毛刺信号。
( 2 ) SINS 解算: 利用惯性导航解算算法对形
态学滤波出来后的数据进行解算, 得到载体运动
的轨迹信息。
( 3 ) 自适应 Kalman滤波估计: 以里程计测量
速度和根据惯性导航原理计算的速度之差作为观
测量, 利用 Kalman 滤波方程得到系统状态的最
优估计值, 利用估计值对根据惯性导航原理结算
的数据进行修正, 最终得到精确的定位坐标。
图 4 管道定位装置图
3.2 试验平台的搭建
为了验证管道定位装置的可行性, 分析不同
测试条件对系统测量精度的影响, 对整个测试平
台进行了搭建, 整个装置的试验示意如图 5 所示。
为了消除初始振动对测量的影响, 在牵引前将系
统静止 5min , 最后人工( 或机械) 将地下电缆管
道路径的三维测绘装置牵引至管道的另一端, 然
后再次静止 5min , 对设备进行回拉, 然后读取数
据, 利用解算程序对测量数据进行解算, 实现对管
道路径的测绘。
图 3 管道路径定位系统算法框图
3 影响测试精度因素分析
3.1 定位装置的制作
由于管道处于地下, GPS ( 或北斗) 信号无法
在地下接收, 而惯性导航技术通过对行程过程中
加速度和角速度的测量, 基于始末端的初始位置
信息, 可实现对地下管道路径的定位。本文根据 图 5 路径定位装置试验示意图
惯性导航原理设计了一套可用于地下管道定位测
3.3 试验数据分析
量的装置, 如图 4 所示。定位装置主要由电子舱、 在试验过程中, 对不同振动程度、 采样频率和
支撑支架、 轮组 3 部分组成, 靠外力牵引在管道内
行进速度匹配程度下的数据进行了测试, 结果如
行走。电子舱内安装有主控电板、 惯性测量单元、
图 6 和表 1 所示。