
Page 69 - 电力与能源2023年第五期
P. 69
曹博源,等:计及虚拟惯性的风电场接入双机系统暂态稳定性研究 491
能量在网络中的分布呈现聚集性的特点,适当地 子运动方程分别表示如下:
2
接 入 双 馈 风 电 机 组 有 利 于 提 高 系 统 的 暂 态 稳 2H 1 d δ 1 (1)
定性。 ω 0 dt 2 = P m1 - P e1
2
在时域仿真方面,不少文献都采用了扩展等 2H 2 d δ 2 = P m2 - P e2 (2)
ω 0 dt 2
面积定则(EEAC)分析风电场并网对电力系统暂
式中 P m,P e,H、δ——发电机的机械功率、电磁
态稳定性的影响 [7-19] 。文献[7]将双馈风电场的功
功率、惯性时间常数和功角;下标 1,2——与同步
率等值为同步发电机的机械功率,通过分析故障
发 电 机 G 1,G 2 有 关 的 变 量 ;ω 0—— 系 统 额 定 角
过程中发电机等值机械功率的变化,得到如下结
速度。
论:若双馈风电场在故障过程中能够低电压穿越
成功,则有利于减少等值发电机的机械功率,提高
系统的暂态稳定性;而若双馈风电场退出运行,则
系统的暂态稳定性需要综合考虑。文献[8]根据
双馈风电机组的等效外特性,理论分析了双馈机
组接入后单端系统的功角稳定性。结果表明双馈
风电机组接入后会减小单端送电系统功角的首摆
幅值,并降低发电机阻尼比。文献[9]通过比较双
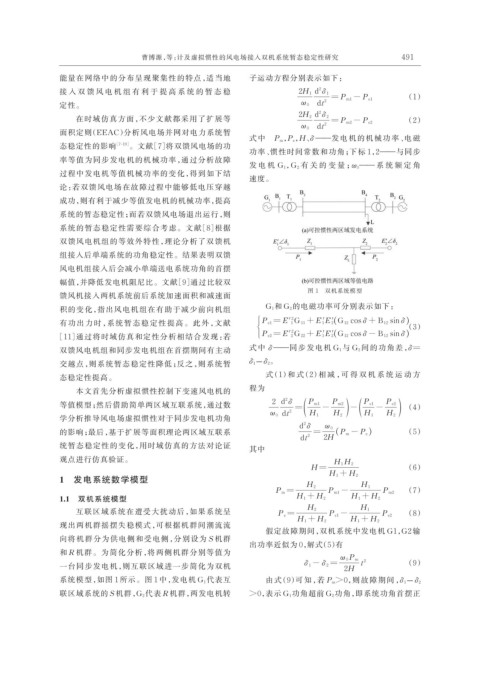
图 1 双机系统模型
馈风机接入两机系统前后系统加速面积和减速面
积的变化,指出风电机组在有助于减少前向机组 G 1 和 G 2 的电磁功率可分别表示如下:
2
有功出力时,系统暂态稳定性提高。此外,文献 ì P e1 = E ′1 G 11 + E ′ 1 E ′ 2(G 12 cos δ + B 12 sin δ )
í (3)
)
2
î
[11]通过将时域仿真和定性分析相结合发现:若 ï ï P e2 = E ′2 G 22 + E ′ 1 E ′ 2(G 12 cos δ - B 12 sin δ
双馈风电机组和同步发电机组在首摆期间有主动 式中 δ——同步发电机 G 1 与 G 2 间的功角差,δ=
交越点,则系统暂态稳定性降低;反之,则系统暂 δ 1-δ 2。
态稳定性提高。 式(1)和 式(2)相 减 ,可 得 双 机 系 统 运 动 方
本文首先分析虚拟惯性控制下变速风电机的 程为
2 d δ )
2
等值模型;然后借助简单两区域互联系统,通过数 = P m1 - P m2 - P e1 - P e2 (4)
ω 0 dt 2 ( H 1 ) ( H 1
学分析推导风电场虚拟惯性对于同步发电机功角 H 2 H 2
d δ
2
的影响;最后,基于扩展等面积理论两区域互联系 = ω 0 ( P m - P e) (5)
dt 2 2H
统暂态稳定性的变化,用时域仿真的方法对论证
其中
观点进行仿真验证。
H 1 H 2
H = (6)
1 发电系统数学模型 H 1 + H 2
H 2 H 1
P m = P m1 - P m2 (7)
1.1 双机系统模型 H 1 + H 2 H 1 + H 2
互联区域系统在遭受大扰动后,如果系统呈 P e = H 2 P e1 - H 1 P e2 (8)
H 1 + H 2 H 1 + H 2
现出两机群摇摆失稳模式,可根据机群间潮流流
假定故障期间,双机系统中发电机 G1,G2 输
向将机群分为供电侧和受电侧,分别设为 S 机群
出功率近似为 0,解式(5)有
和 R 机群。为简化分析,将两侧机群分别等值为
ω 0 P m t 2
一台同步发电机,则互联区域进一步简化为双机 δ 1 - δ 2 = 2H (9)
系统模型,如图 1 所示。图 1 中,发电机 G 1 代表互 由式(9)可知,若 P m>0,则故障期间,δ 1-δ 2
联区域系统的 S 机群,G 2 代表 R 机群,两发电机转 >0,表示 G 1 功角超前 G 2 功角,即系统功角首摆正