
Page 70 - 电力与能源2023年第五期
P. 70
492 曹博源,等:计及虚拟惯性的风电场接入双机系统暂态稳定性研究
向摆动,此时称 G 1 为前向机组。反之,P m<0,则 络,则将风电机组的机械功率、电磁功率及惯性时
故障期间,δ 1-δ 2<0,表示 G 1 功角滞后 G 2 功角,即 间常数归算入发电机 G 2,形成等值发电机 G gw2。
系统功角首摆反向摆动,此时称 G 1 为后向机组。
2 虚拟惯性对系统暂态稳定影响判定
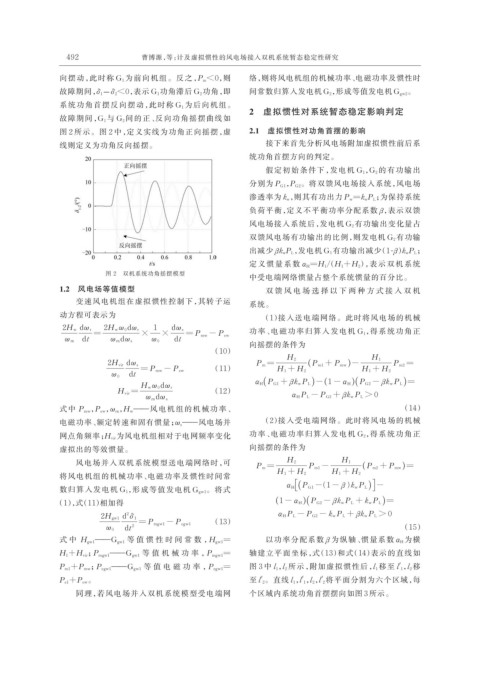
故障期间,G 1 与 G 2 间的正、反向功角摇摆曲线如
图 2 所示。图 2 中,定义实线为功角正向摇摆,虚 2.1 虚拟惯性对功角首摆的影响
线则定义为功角反向摇摆。 接下来首先分析风电场附加虚拟惯性前后系
统功角首摆方向的判定。
假定初始条件下,发电机 G 1,G 2 的有功输出
分别为 P G1,P G2。将双馈风电场接入系统,风电场
渗透率为 k w,则其有功出力 P w=k wP L;为保持系统
负荷平衡,定义不平衡功率分配系数 β,表示双馈
风电场接入系统后,发电机 G 2 有功输出变化量占
双馈风电场有功输出的比例,则发电机 G 2 有功输
出减少 βk wP L,发电机 G 1 有功输出减少(1-β)k wP L;
定义惯量系数 α H=H 1/(H 1+H 2 ),表示双机系统
图 2 双机系统功角摇摆模型
中受电端网络惯量占整个系统惯量的百分比。
1.2 风电场等值模型 双 馈 风 电 场 选 择 以 下 两 种 方 式 接 入 双 机
变速风电机组在虚拟惯性控制下,其转子运 系统。
动方程可表示为 (1)接入送电端网络。此时将风电场的机械
1
2H w dω r = 2H w ω 0 dω r × × dω s 功率、电磁功率归算入发电机 G 1,得系统功角正
dt dt = P mw - P ew
ω rn ω rn dω s ω 0
向摇摆的条件为
(10)
H 2 H 1
P m = P m2 =
2H vir dω s (11) ( P m1 + P mw) -
dt = P mw - P ew H 1 + H 2 H 1 + H 2
ω 0
α H( P G1 + βk w P L) -(1 - α H)( P G2 - βk w P L) =
H w ω 0 dω r
H vir = (12)
α H P L - P G2 + βk w P L > 0
ω rn dω s
式中 P mw,P ew,ω rn,H w——风电机组的机械功率、 (14)
电磁功率、额定转速和固有惯量;ω s——风电场并 (2)接入受电端网络。此时将风电场的机械
网点角频率;H vir 为风电机组相对于电网频率变化 功率、电磁功率归算入发电机 G 2,得系统功角正
虚拟出的等效惯量。 向摇摆的条件为
风电场并入双机系统模型送电端网络时,可 H 2 H 1
P m = P m1 - ( P m2 + P mw) =
将风电机组的机械功率、电磁功率及惯性时间常 H 1 + H 2 H 1 + H 2
α H[( P G1 -(1 - β ) k w P L)] -
数归算入发电机 G 1,形成等值发电机 G gw1。将式
(1),式(11)相加得 (1 - α H)( P G2 - βk w P L + k w P L) =
2 α H P L - P G2 - k w P L + βk w P L > 0
2H gw1 d δ 1 (13)
dt 2 = P mgw1 - P egw1 (15)
ω 0
式 中 H gw1——G gw1 等 值 惯 性 时 间 常 数 ,H gw1= 以功率分配系数 β 为纵轴、惯量系数 α H 为横
H 1+H vir;P mgw1——G gw1 等 值 机 械 功 率 ,P mgw1= 轴建立平面坐标,式(13)和式(14)表示的直线如
P m1+P mw;P egw1——G gw1 等 值 电 磁 功 率 ,P egw1= 图 3 中 l 1,l 2 所示,附加虚拟惯性后,l 1 移至 l′ 1,l 2 移
P e1+P ew。 至 l′ 2。直线 l 1,l′ 1,l 2,l′ 2 将平面分割为六个区域,每
同理,若风电场并入双机系统模型受电端网 个区域内系统功角首摆摆向如图 3 所示。