
Page 36 - 电力与能源2024年第一期
P. 36
30 徐东旭,等:基于混合控制策略的主动配电网韧性提升方法
给定的参考范围内,提出分布式控制算法。假设 表 2 控制参数
DG 之间的通信是强连接的,为了解决范围一致性 变量 数值 变量 数值
1.2×10 4 L 1 /mH 50
λ 1
问题,DG 设计了电压偏差误差函数,第 i 个 DG 的
9×10 6 R 1 /Ω 100
λ 2
电压偏差跟踪误差定义如下: λ 3 8×10 9 R 3 /Ω 10
N 400 R 4,5 /Ω 50
K 1
e i,1 = ∑ a ij [ η 1 ( y ̂ i,1 )- η 1 ( y ̂ j,1 ) ]+ b i η 1 ( y ̂ i,1 ) (22) α 500 L 2 /mH 15
j = 1 β 1 500 L 3 /mH 10
N
e i,2 = ∑ a ij [ η 2 ( y ̂ i,2 )- η 2 ( y ̂ j,2 ) ]+ b i η 2 ( y ̂ i,2 ) (23) γ 1.5 L 4,5 /mH 25
j = 1
t
t
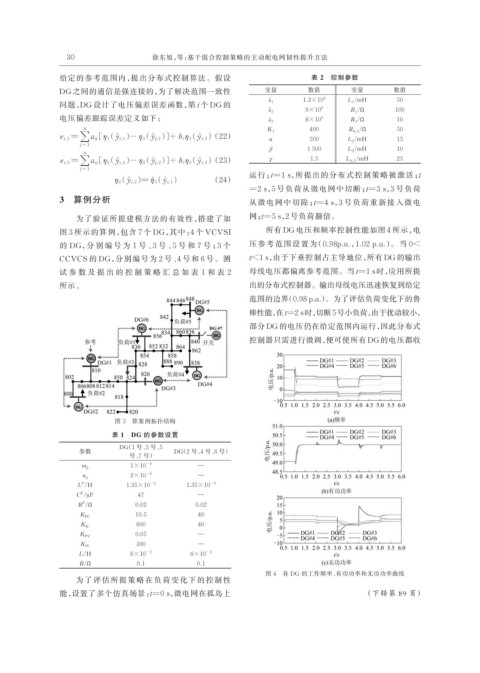
运行;=1 s,所提出的分布式控制策略被激活;
η 2 ( y ̂ i,2 )= η ̇ 1 ( y ̂ i,1 ) (24)
t
=2 s,5 号负荷从微电网中切断;=3 s,3 号负荷
3 算例分析 从微电网中切除;=4 s,3 号负荷重新接入微电
t
t
为了验证所提建模方法的有效性,搭建了如 网;=5 s,2 号负荷翻倍。
所有 DG 电压和频率控制性能如图 4 所示,电
图 3 所示的算例,包含 7 个 DG,其中:4 个 VCVSI
的 DG,分 别 编 号 为 1 号 、3 号 、5 号 和 7 号 ;3 个 压参考范围设置为(0.98p.u.,1.02 p.u.)。当 0<
CCVCS 的 DG,分别编号为 2 号、4 号和 6 号。测 t<1 s,由于下垂控制占主导地位,所有 DG 的输出
试 参 数 及 提 出 的 控 制 策 略 汇 总 如 表 1 和 表 2 母线电压都偏离参考范围。当 t=1 s 时,应用所提
所示。 出的分布式控制器。输出母线电压迅速恢复到给定
范围的边界(0.98 p.u.)。为了评估负荷变化下的鲁
棒性能,在t=2 s时,切断5号小负荷,由于扰动较小,
部分 DG 的电压仍在给定范围内运行,因此分布式
控制器只需进行微调,便可使所有 DG 的电压都收
图 3 算案例拓扑结构
表 1 DG 的参数设置
DG(1 号、3 号、5
参数 DG(2 号、4 号、6 号)
号、7 号)
-4
m p 1×10 —
n q 2×10 -4 —
F -3 -3
L /H 1.35×10 1.35×10
F
C /μF 47 —
F
R /Ω 0.02 0.02
10.5 40
K PC
600 40
K IC
0.05 —
K PV
390 —
K IV
-3 -3
L/H 6×10 6×10
R/Ω 0.1 0.1
图 4 各 DG 的工作频率、有功功率和无功功率曲线
为了评估所提策略在负荷变化下的控制性
t
能,设置了多个仿真场景:=0 s,微电网在孤岛上 (下转第 89 页)