
Page 34 - 电力与能源2024年第一期
P. 34
28 徐东旭,等:基于混合控制策略的主动配电网韧性提升方法
频率,保持功率平衡。当需求平衡发生变化时,传 高负荷运行。在分布式控制器中引入微分反馈,
统下垂控制会引起稳态电压/频率偏差,二次控制 获得整个分布式系统的简化滑模结构,使控制性
可有效解决上述偏差。二次控制可分为集中控制 能易于确定,控制稳定性易于证明,较之传统控制
和分布式控制两种方式。传统的集中控制需要在 器具有更好的抗干扰能力。利用统一的分布式控
一个控制中心收集 DG 的信息,通信较为复杂。 制方法使所有 DG 共享一个通信网络。
相比之下,分布式控制为消除配电网的频率和电
1 并网逆变器建模
压偏差提供了更好的解决方案。稀疏通信网络和
分布式安装控制器显著减少了通信时间和计算复 1.1 构网型逆变器
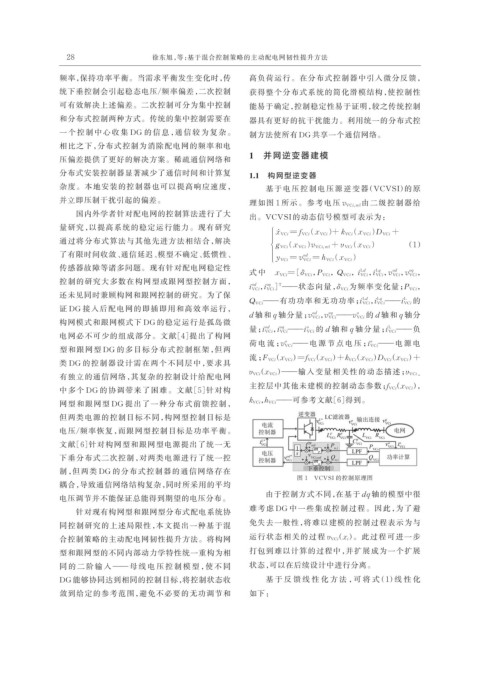
杂度。本地安装的控制器也可以提高响应速度, 基于电压控制电压源逆变器(VCVSI)的原
并立即压制干扰引起的偏差。 理如图 1 所示。参考电压 v VCi,ref 由二级控制器给
国内外学者针对配电网的控制算法进行了大 出。VCVSI 的动态信号模型可表示为:
量研究,以提高系统的稳定运行能力。现有研究
ì x ̇ VCi = f VCi ( x VCi )+ k VCi ( x VCi ) D VCi +
ï ï
通过将分布式算法与其他先进方法相结合,解决 ï ï
í g VCi ( x VCi ) v VCi,ref + υ VCi ( x VCi ) (1)
了有限时间收敛、通信延迟、模型不确定、低惯性、 ï ï od
ï ï y VCi = v VCi = h VCi ( x VCi )
î
传感器故障等诸多问题。现有针对配电网稳定性
Lq
oq
od
Ld
式 中 x VCi=[δ VCi,P VCi, Q VCi, i VCi, i VCi, v VCi, v VCi,
控制的研究大多数在构网型或跟网型控制方面,
od
oq
i
T
i VCi, VCi ] ——状态向量,δ VCi 为频率变化量;P VCi,
还未见同时兼顾构网和跟网控制的研究。为了保
Lq
Ld
L
Q VCi——有功功率和无功功率;i VCi,i VCi——i VCi 的
证 DG 接入后配电网的即插即用和高效率运行,
od
oq
o
d 轴和 q 轴分量;v VCi,v VCi——v VCi 的 d 轴和 q 轴分
构网模式和跟网模式下 DG 的稳定运行是孤岛微
od
o
oq
量; i VCi, i VCi——i VCi 的 d 轴和 q 轴分量; i VCi——负
L
电网必不可少的组成部分。文献[4]提出了构网
o
o
荷 电 流 ; v VCi—— 电 源 节 点 电 压 ; i VCi—— 电 源 电
型和跟网型 DG 的多目标分布式控制框架,但两
流 ;F VCi (x VCi )=f VCi (x VCi )+k VCi (x VCi )D VCi (x VCi )+
类 DG 的控制器设计需在两个不同层中,要求具
υ VCi (x VCi )——输入变量相关性的动态描述;υ VCi_
有独立的通信网络,其复杂的控制设计给配电网
f
主控层中其他未建模的控制动态参数; VCi (x VCi ),
中多个 DG 的协调带来了困难。文献[5]针对构
k VCi,h VCi——可参考文献[6]得到。
网型和跟网型 DG 提出了一种分布式前馈控制,
但两类电源的控制目标不同,构网型控制目标是
电压/频率恢复,而跟网型控制目标是功率平衡。
文献[6]针对构网型和跟网型电源提出了统一无
下垂分布式二次控制,对两类电源进行了统一控
制,但两类 DG 的分布式控制器的通信网络存在
图 1 VCVSI 的控制原理图
耦合,导致通信网络结构复杂,同时所采用的平均
由于控制方式不同,在基于 dq 轴的模型中很
电压调节并不能保证总能得到期望的电压分布。
难考虑 DG 中一些集成控制过程。因此,为了避
针对现有构网型和跟网型分布式配电系统协
同控制研究的上述局限性,本文提出一种基于混 免失去一般性,将难以建模的控制过程表示为与
合控制策略的主动配电网韧性提升方法。将构网 运行状态相关的过程 υ VCi (x i )。此过程可进一步
型和跟网型的不同内部动力学特性统一重构为相 打包到难以计算的过程中,并扩展成为一个扩展
同 的 二 阶 输 入 —— 母 线 电 压 控 制 模 型 ,使 不 同 状态,可以在后续设计中进行分离。
DG 能够协同达到相同的控制目标,将控制状态收 基 于 反 馈 线 性 化 方 法 ,可 将 式(1)线 性 化
敛到给定的参考范围,避免不必要的无功调节和 如下: