
Page 48 - 电力与能源2024年第三期
P. 48
322 廖雨薇:基于模拟退火算法的无人机巡检路径优化研究
n n (6),则接受新路径;否则采用旧路径。
minD = ∑∑ d ij x ij (1)
i = 1 j = 1 ì - Δf
ï ï
n í ξ < e T (6)
s. t. ∑ x ij = 1, i ∈ V (2) ï ï ï ï [ Tk = aTk - 1 ]
î
j = 1
n 式中 ξ——0 到 1 之间的随机数 ;T——控制参
j
∑ x ij = 1,∈ V (3)
k
j = 1 数,初始值设置为 100;——迭代次数;a——设置
∑∑ x ij ≤| S |- 1,∀S ⊂ V,2 ≤| S |≤ n - 1(4) 为 0.97。
i ∈ S j ∈ S
式中 d ij——巡检点 i 与 j 之间的距离;V——所 3 结果分析
有巡检点的集合。
为验证本文提出的基于旅行商模型采用模拟
约束条件式(2)~式(3)表明,任意一个巡检
退火算法优化无人机巡检路径的优化结果,搭建
点仅经过一次。
了仿真模型,分析了酒杯型塔杆、双回型塔杆、三
j
当经过巡检点 i,时,x ij=1;当不经过巡检点
回型塔杆以及猫头型塔杆的巡检路径。
j
i,时,x ij=0。约束条件式(4)表明,所有巡检点都
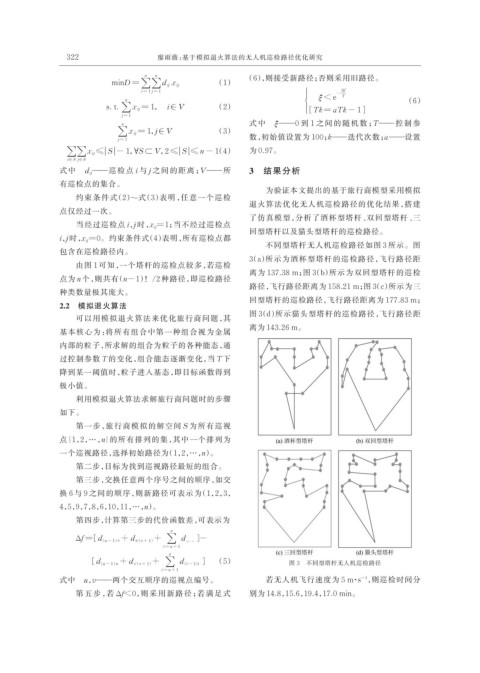
不同型塔杆无人机巡检路径如图 3 所示。图
包含在巡检路径内。
3(a)所示为酒杯型塔杆的巡检路径,飞行路径距
由图 1 可知,一个塔杆的巡检点较多,若巡检
离为 137.38 m;图 3(b)所示为双回型塔杆的巡检
点为 n 个,则共有(n−1)!/2 种路径,即巡检路径
路径,飞行路径距离为 158.21 m;图 3(c)所示为三
种类数量极其庞大。
回型塔杆的巡检路径,飞行路径距离为 177.83 m;
2.2 模拟退火算法
图 3(d)所示猫头型塔杆的巡检路径,飞行路径距
可以用模拟退火算法来优化旅行商问题,其
离为 143.26 m。
基本核心为:将所有组合中第一种组合视为金属
内部的粒子,所求解的组合为粒子的各种能态,通
过控制参数 T 的变化,组合能态逐渐变化,当 T 下
降到某一阈值时,粒子进入基态,即目标函数得到
极小值。
利用模拟退火算法求解旅行商问题时的步骤
如下。
第一步,旅行商模拟的解空间 S 为所有巡视
点{1,2,…,n}的所有排列的集,其中一个排列为
一个巡视路径,选择初始路径为(1,2,…,n)。
第二步,目标为找到巡视路径最短的组合。
第三步,交换任意两个序号之间的顺序,如交
换 6 与 9 之间的顺序,则新路径可表示为(1,2,3,
4,5,9,7,8,6,10,11,…,n)。
第四步,计算第三步的代价函数差,可表示为
n
Δf =[ d ( u - 1 ) v + d u ( v + 1 ) + ∑ d i i - 1 ]-
i = u + 1
n
[ d ( u - 1 ) u + d v ( v + 1 ) + ∑ d ( i - 1 ) i ] (5) 图 3 不同型塔杆无人机巡检路径
i = u + 1
式中 u,v——两个交互顺序的巡视点编号。 若无人机飞行速度为 5 m·s ,则巡检时间分
—1
第五步,若 Δf<0,则采用新路径;若满足式 别为 14.8,15.6,19.4,17.0 min。