
Page 47 - 电力与能源2024年第三期
P. 47
廖雨薇:基于模拟退火算法的无人机巡检路径优化研究 321
无人机路径优化的目标就是无人机在空中飞
1 塔杆
行的距离最短,也即空中飞行时间最短。
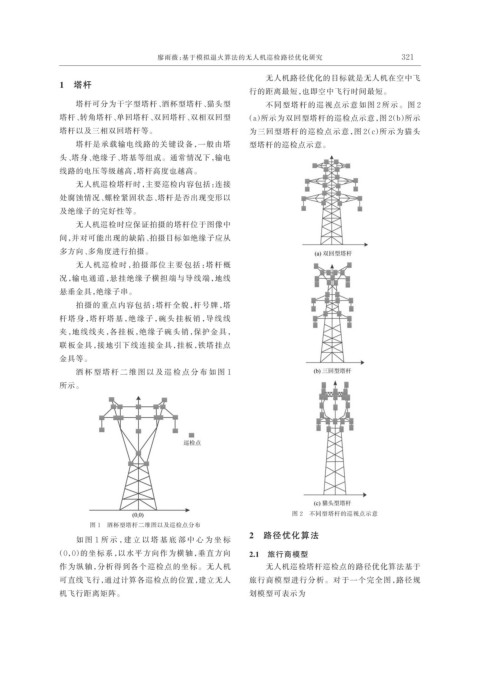
塔杆可分为干字型塔杆、酒杯型塔杆、猫头型 不同型塔杆的巡视点示意如图 2 所示。图 2
塔杆、转角塔杆、单回塔杆、双回塔杆、双相双回型 (a)所示为双回型塔杆的巡检点示意,图 2(b)所示
塔杆以及三相双回塔杆等。 为三回型塔杆的巡检点示意,图 2(c)所示为猫头
塔杆是承载输电线路的关键设备,一般由塔 型塔杆的巡检点示意。
头、塔身、绝缘子、塔基等组成。通常情况下,输电
线路的电压等级越高,塔杆高度也越高。
无人机巡检塔杆时,主要巡检内容包括:连接
处腐蚀情况、螺栓紧固状态、塔杆是否出现变形以
及绝缘子的完好性等。
无人机巡检时应保证拍摄的塔杆位于图像中
间,并对可能出现的缺陷、拍摄目标如绝缘子应从
多方向、多角度进行拍摄。
无人机巡检时,拍摄部位主要包括:塔杆概
况,输电通道,悬挂绝缘子横担端与导线端,地线
悬垂金具,绝缘子串。
拍摄的重点内容包括:塔杆全貌,杆号牌,塔
杆塔身,塔杆塔基,绝缘子,碗头挂板销,导线线
夹,地线线夹,各挂板,绝缘子碗头销,保护金具,
联板金具,接地引下线连接金具,挂板,铁塔挂点
金具等。
酒 杯 型 塔 杆 二 维 图 以 及 巡 检 点 分 布 如 图 1
所示。
图 2 不同型塔杆的巡视点示意
图 1 酒杯型塔杆二维图以及巡检点分布
2 路径优化算法
如 图 1 所 示 ,建 立 以 塔 基 底 部 中 心 为 坐 标
(0,0)的坐标系,以水平方向作为横轴,垂直方向 2.1 旅行商模型
作为纵轴,分析得到各个巡检点的坐标。无人机 无人机巡检塔杆巡检点的路径优化算法基于
可直线飞行,通过计算各巡检点的位置,建立无人 旅行商模型进行分析。对于一个完全图,路径规
机飞行距离矩阵。 划模型可表示为