
Page 136 - 电力与能源2024年第四期
P. 136
530 陈 涛,等:变电站视频确认方式一键顺控系统与建设研究
隔离设备建立通信,正向隔离设备通过 UDP 传递
一键顺控联动信号,反向隔离设备通过文件传递
图像识别结果。
在一次设备按照预定操作步骤由一键顺控系
统进行顺控操作时,基于视频确认方式的一键顺
控系统会根据当前操作设备的运行状态判定其下
一步动作,因此在进行下一步操作时,应确保上一
步操作的设备图像信号连续无间断。
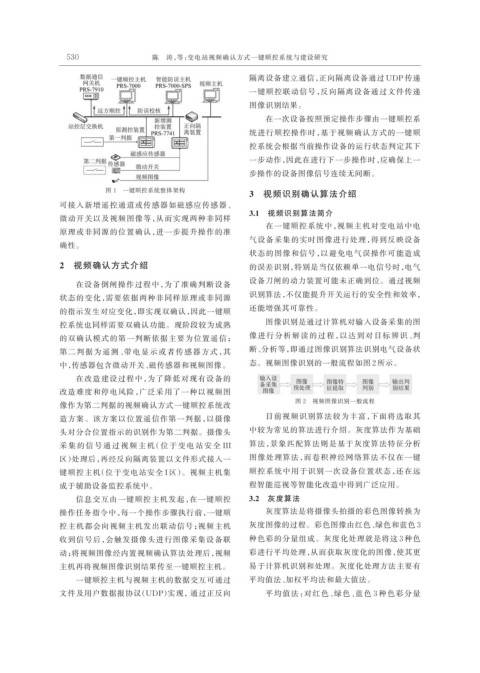
图 1 一键顺控系统整体架构
3 视频识别确认算法介绍
可接入新增遥控通道或传感器如磁感应传感器、
3.1 视频识别算法简介
微动开关以及视频图像等,从而实现两种非同样
在一键顺控系统中,视频主机对变电站中电
原理或非同源的位置确认,进一步提升操作的准
气设备采集的实时图像进行处理,得到反映设备
确性。
状态的图像和信号,以避免电气误操作可能造成
2 视频确认方式介绍 的误差识别,特别是当仅依赖单一电信号时,电气
设备刀闸的动力装置可能未正确到位。通过视频
在设备倒闸操作过程中,为了准确判断设备
状态的变化,需要依据两种非同样原理或非同源 识别算法,不仅能提升开关运行的安全性和效率,
的指示发生对应变化,即实现双确认,因此一键顺 还能增强其可靠性。
控系统也同样需要双确认功能。现阶段较为成熟 图像识别是通过计算机对输入设备采集的图
的双确认模式的第一判断依据主要为位置遥信; 像进行分析解读的过程,以达到对目标辨识、判
第二判据为遥测、带电显示或者传感器方式,其 断、分析等,即通过图像识别算法识别电气设备状
中,传感器包含微动开关、磁传感器和视频图像。 态。视频图像识别的一般流程如图 2 所示。
在改造建设过程中,为了降低对现有设备的
改造难度和停电风险,广泛采用了一种以视频图
图 2 视频图像识别一般流程
像作为第二判据的视频确认方式一键顺控系统改
造方案。该方案以位置遥信作第一判据,以摄像 目前视频识别算法较为丰富,下面将选取其
头对分合位置指示的识别作为第二判据。摄像头 中较为常见的算法进行介绍。灰度算法作为基础
算法,景象匹配算法则是基于灰度算法特征分析
采 集 的 信 号 通 过 视 频 主 机(位 于 变 电 站 安 全 III
区)处理后,再经反向隔离装置以文件形式接入一 图像处理算法,而卷积神经网络算法不仅在一键
键顺控主机(位于变电站安全 I 区)。视频主机集 顺控系统中用于识别一次设备位置状态,还在远
成于辅助设备监控系统中。 程智能巡视等智能化改造中得到广泛应用。
信息交互由一键顺控主机发起,在一键顺控 3.2 灰度算法
操作任务指令中,每一个操作步骤执行前,一键顺 灰度算法是将摄像头拍摄的彩色图像转换为
控主机都会向视频主机发出联动信号;视频主机 灰度图像的过程。彩色图像由红色、绿色和蓝色 3
收到信号后,会触发摄像头进行图像采集设备联 种色彩的分量组成。灰度化处理就是将这 3 种色
动;将视频图像经内置视频确认算法处理后,视频 彩进行平均处理,从而获取灰度化的图像,使其更
主机再将视频图像识别结果传至一键顺控主机。 易于计算机识别和处理。灰度化处理方法主要有
一键顺控主机与视频主机的数据交互可通过 平均值法、加权平均法和最大值法。
文件及用户数据报协议(UDP)实现,通过正反向 平均值法:对红色、绿色、蓝色 3 种色彩分量