
Page 39 - 电力与能源2022年第三期
P. 39
赵晨宇, 等: 光纤芯交换机器人在变电站中的应用 2 9
2
成, 除此之外, 通信接口模块作为媒介, 还可实现
与主站端的数据实时下传和上传功能。数据交换
完成后, 由测试模块完成对光纤芯的测试并将最
终测试结果上传到主站中并实时保存。
主站的组成框图如图 2 所示。主站的核心组
成部分包含主站端服务器、 操作平台和主站端通
信接口模块, 主站的通信接口模块通过现有的网
络和n 个子站端的通信模块连接, 如此实现与子
站的数据交换功能, 完成光纤芯的切换, 另外, 子 图 3 光纤芯交换机器人内部的机械图
站的通信数据也可及时地完成存储。
图 1 子站组成框图
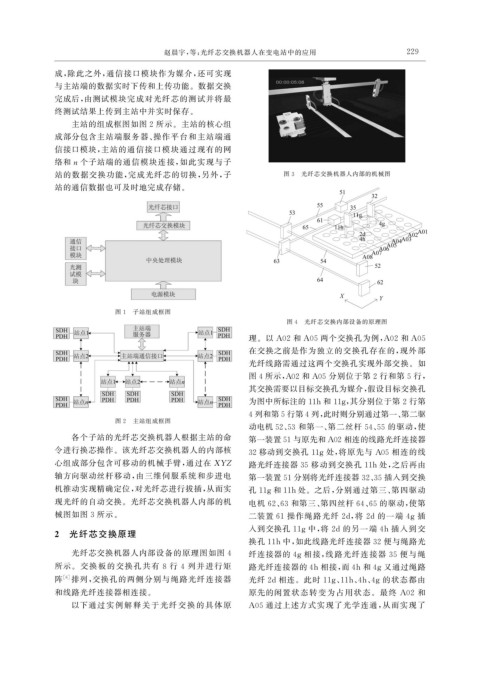
图 4 光纤芯交换内部设备的原理图
理。以 A02 和 A05 两个交换孔为例, A02 和 A05
在交换之前是作为独立的交换孔存在的, 现外部
光纤线路需通过这两个交换孔实现外部交换。如
图4所示, A02和 A05 分别位于第 2 行和第 5 行,
其交换需要以目标交换孔为媒介, 假设目标交换孔
为图中所标注的 11h和 11 g 其分别位于第 2 行第
,
4列和第5行第4列, 此时则分别通过第一、 第二驱
图 2 主站组成框图
动电机52 、 53 和第一、 第二丝杆 54 、 55 的驱动, 使
各个子站的光纤芯交换机器人根据主站的命 第一装置51与原先和 A02相连的线路光纤连接器
令进行换芯操作。该光纤芯交换机器人的内部核 32移动到交换孔 11 g 处, 将原先与 A05 相连的线
心组成部分包含可移动的机械手臂, 通过在 XYZ 路光纤连接器 35 移动到交换孔 11h 处, 之后再由
轴方向驱动丝杆移动, 由三维伺服系统和步进电 第一装置51分别将光纤连接器32 、 35插入到交换
机推动实现精确定位, 对光纤芯进行拔插, 从而实 孔11 g 和11h处。之后, 分别通过第三、 第四驱动
现光纤的自动交换。光纤芯交换机器人内部的机 电机 62 、 63 和第三、 第四丝杆 64 、 65 的驱动, 使第
械图如图 3 所示。 二装置 61 操作绳路光纤 2d , 将 2d 的一端 4 g 插
入到交换孔 11 g 中, 将 2d 的另一端 4h 插入到交
2 光纤芯交换原理
换孔11h 中, 如此线路光纤连接器32 便与绳路光
光纤芯交换机器人内部设备的原理图如图 4 纤连接器的 4 g 相接, 线路光纤连接器 35 便与绳
所示。交换板的交换孔共有 8 行 4 列并进行矩 路光纤连接器的4h 相接, 而4h 和4 g 又通过绳路
阵 [ 6 ] 排列, 交换孔的两侧分别与绳路光纤连接器 光纤 2d相连。此时 11 g11h 、 4h 、 4 g 的状态都由
、
和线路光纤连接器相连接。 原先的闲置状态转变为占用状态。最终 A02 和
以下通过实例解释关于光纤 交 换 的 具 体 原 A05通过上述方式实现了光学连通, 从而实现了