
Page 25 - 电力与能源2022年第六期
P. 25
万炳才, 等: 基于惯性导航原理的电缆排管检测系统设计 4 7
8
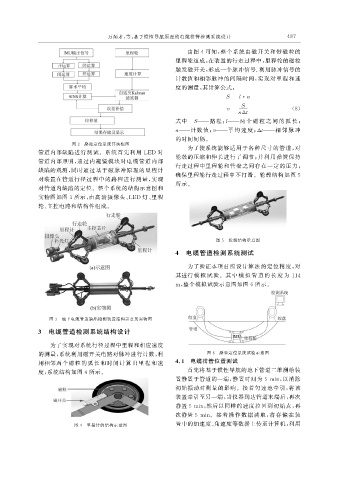
由图 4 可知, 整个系统由磁开关和带磁粒的
里程轮组成, 在装置的行走过程中, 里程轮的磁粒
触发磁开关, 形成一个脉冲信号 . 利用脉冲信号的
计数值和相邻脉冲的间隔时间, 实现对里程和速
度的测量, 其计算公式:
S =l · n
S
v = ( 8 )
nΔt
式中 S ———路 程; l ———两 个 磁 粒 之 间 的 弧 长;
n ———计数 值; v ———平 均 速 度; Δt ———相 邻 脉 冲
的时间间隔。
图 2 路径定位系统算法框图
为了使系统能够适用于各种尺寸的管道, 对
管道内部缺陷进行测试。系统首先利用 LED 对
轮毂的压缩和伸长进行了调节; 并利用弹簧保持
管道内部照明, 通过内窥镜模块对电缆管道内部
行走过程中里程轮和管壁之间存在一定的压力,
缺陷的观测, 同时通过基于磁脉冲原理的里程计
确保里程轮行走过程中不打滑。轮毂结构如图 5
对装置在管道行径过程中的路程进行测量, 实现
所示。
对管道内缺陷的定位。整个系统的结构示意图和
实物图如图 3 所示, 由高清摄像头、 LED 灯、 里程
轮、 主控电路和结构件组成。
图 5 轮毂结构示意图
4 电缆管道检测系统测试
为了验证本项目所设计算法的定位精度, 对
其进行 模 拟 试 验。其 中 模 拟 管 道 的 长 度 为 114
m , 整个模拟试验示意图如图 6 所示。
图 3 地下电缆管道缺陷检测装置结构示意及实物图
3 电缆管道检测系统结构设计
为了实现对系统行径过程中里程和相应速度
的测量, 系统利用磁开关电路对脉冲进行计数, 利 图 6 路径定位系统试验示意图
用相邻两个磁粒的弧 长和时间计算出里程和速 4.1 电缆排管位置测试
首先将基于惯性导航的地下管道三维测绘装
度, 系统结构如图 4 所示。
置静置于管道的一端, 静置时间为 5min , 以消除
初始振动对测量的影响。接着匀速地牵引, 将该
装置牵引至另一端, 当仪器到达管道末端后, 再次
静置 5min , 然后以同样的速度拉回到初始点, 再
次静置 5 min 。接着操作数据读取, 将存储在装
图 4 里程计的结构示意图 置中的加速度、 角速度等数据上传至计算机, 利用