
Page 26 - 电力与能源2022年第六期
P. 26
4 8 8 万炳才, 等: 基于惯性导航原理的电缆排管检测系统设计
编制的解算算法对数据进行处理和解算, 最终得
到相应的轨迹数据。处理后的管道首尾 - 高程图
和管道首尾 - 水平偏差图分别如图 7 和图 8 所示。
图 7 管道首尾 - 高程曲线图
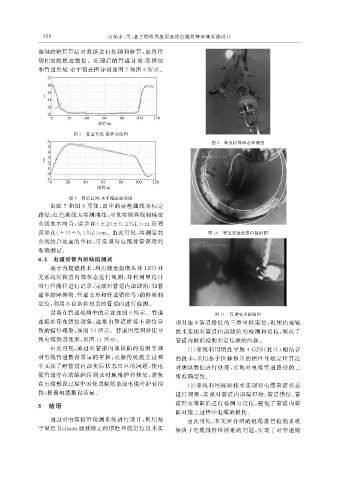
图 9 管道内部状态检测图
图 8 管道首尾 - 水平偏差曲线图
由图 7 和图 8 可知, 图中的蓝色曲线为标定
路径, 红色曲线为实测曲线, 可见实测曲线和标定
曲线基本吻合, 误差在( ±20±0.2%L ) cm 高程
误差在( ±15±0.1% L ) cm 。由此可见, 将测量的 图 10 管道连接处错位缺陷图
曲线结合地面的坐标, 可实现对电缆排管深度的
准确测量。
4.2 电缆排管内部缺陷测试
基于内窥镜技术, 利用微型摄像头和 LED 补
光系统对管道内部状态进行观测, 并利用里程计
对行径路径进行记录, 完成对管道内部缺陷( 如管
道中的障碍物、 管道变形和管道错位等) 的检测和
定位, 利用本设备在相关的管道内进行检测。
设备在管道检测中的示意如图 9 所示。管道 图 11 管道变形缺陷图
连接处存在错位现象, 这是由管道拼接不到位导 现对地下管道路径的三维坐标定位, 利用内窥镜
致的错位现象, 如图 10 所示。管道因受到挤压导 技术实现对管道内部缺陷的检测和定位, 解决了
致电缆管道变形, 如图 11 所示。 管道内缺陷检测和定位难的问题。
由此可见, 通过对管道内部缺陷的检测实现 ( 1 ) 系统利用惯性导航 +GPS ( 北斗) 相结合
对电缆管道敷设质量的掌握, 克服传统施工过程 的技术, 采用基于位移修正的惯性导航定位算法
中无法了解管道内部实际状态盲区的问题, 使电 对测试数据进行处理, 实现对电缆管道路径的三
缆管道存在的缺陷得到及时地维护和修复, 避免 维准确定位。
在电缆敷设过程中因管道缺陷造成电缆外护套损 ( 2 ) 系统利用视频技术实现对电缆管道状态
伤, 提高电缆敷设质量。 进行观测, 实现对管道内部障碍物、 管道错位、 管
5 结语 道形变等缺陷进行检测与定位, 避免了管道内缺
陷对施工过程中电缆的损伤。
通过对电缆排管检测系统进行设计, 利用基 由此可见, 本文所介绍的电缆排管检测系统
于里程 Kalman滤波修正的惯性导航定位技术实 解决了电缆排管检测难的问题, 实现了对管道路