
Page 122 - 电力与能源2021年第一期
P. 122
1 1 6 郑 恒, 等: 超超临界机组低频振荡原因分析及抑制措施
基于这些背景, 本文分析一起火电机组实际
产生振荡的原因及机理, 立足工程应用, 探索提升
网源协调的安全性和稳定性的方法, 为同类型机
组提供借鉴。
1 功率振荡过程及原因分析
某电厂安装有 2 台百万千瓦超超临界燃煤机
组, 配套东汽引进日立技术生产的超超临界、 冲
动、 中间再热、 三缸四排汽、 抽凝式汽轮机, 初始设
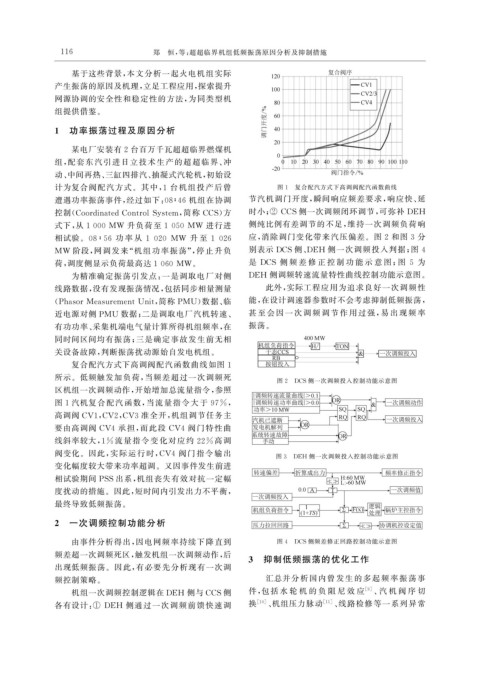
计为复合阀配汽方式。其中, 1 台机组投产后曾 图 1 复合配汽方式下高调阀配汽函数曲线
遭遇功率振荡事件, 经过如下: 08∶46 机组在协调 节汽机调门开度, 瞬间响应频差要求, 响应快、 延
控制( CoordinatedControlS y stem , 简称 CCS ) 方 时小; ② CCS 侧一次调频闭环调节, 可弥补 DEH
式下, 从 1000MW 升负荷至 1050 MW 进行进 侧纯比例有差调节的不足, 维持一次调频负荷响
应, 消除调门变化带来汽压偏差。图 2 和图 3 分
相试验。 08∶56 功 率 从 1020 MW 升 至 1026
MW 阶段, 网调发来“ 机组功率振荡”, 停止升负 别表示 DCS 侧、 DEH 侧一次调频投入判据; 图 4
荷, 调度侧显示负荷最高达 1060MW 。 是 DCS 侧 频 差 修 正 控 制 功 能 示 意 图; 图 5 为
为精准确定振荡引发点: 一是调取电厂对侧 DEH 侧调频转速流量特性曲线控制功能示意图。
线路数据, 没有发现振荡情况, 包括同步相量测量 此外, 实际工程应用为追求良好一次调频性
( PhasorMeasurementUnit , 简称 PMU ) 数据、 临 能, 在设计调速器参数时不会考虑抑制低频振荡,
近电源对侧 PMU 数据; 二是调取电厂汽机转速、 甚至 会 因 一 次 调 频 调 节 作 用 过 强, 易 出 现 频 率
有功功率、 采集机端电气量计算所得机组频率, 在 振荡。
同时间区间均有振荡; 三是确定事故发生前无相
关设备故障, 判断振荡扰动源始自发电机组。
复合配汽方式下高调阀配汽函数曲线如图 1
所示。低频触发加负荷, 当频差超过一次调频死
图 2 DCS侧一次调频投入控制功能示意图
区机组一次调频动作, 开始增加总流量指令, 参照
图 1 汽机复合配汽函数, 当流量指令大于 97% ,
高调阀 CV1 , CV2 , CV3 准全开, 机组调节任务主
要由高调阀 CV4 承担, 而此段 CV4 阀门特性曲
线斜率较大, 1% 流量指令变化对应约 22% 高调
阀变化。因此, 实际运行时, CV4 阀门指令输出 图 3 DEH 侧一次调频投入控制功能示意图
变化幅度较大带来功率超调。又因事件发生前进
相试验期间 PSS 出系, 机组丧失有效对抗一定幅
度扰动的措施。因此, 短时间内引发出力不平衡,
最终导致低频振荡。
2 一次调频控制功能分析
由事件分析得出, 因电网频率持续下降直到 图 4 DCS侧频差修正回路控制功能示意图
频差超一次调频死区, 触发机组一次调频动作, 后
3 抑制低频振荡的优化工作
出现低频振荡。因此, 有必要先分析现有一次调
汇总并分析国内曾发生的多 起 频 率 振 荡 事
频控制策略。
机组一次调频控制逻辑在 DEH 侧与 CCS 侧 件, 包 括 水 轮 机 的 负 阻 尼 效 应 [ 9 ] 、 汽 机 阀 序 切
各有设计: ① DEH 侧通过一次调频前馈快速调 换 [ 10 ] 、 机组压力脉动 [ 11 ] 、 线路检修等一系列异常